

A Linear Approach to Optimize an EMG-Driven Neuromusculoskeletal Model for Movement Intention Detection in Myo-Control: A Case Study on Shoulder and Elbow Joints
- PMID: 30483090
- PMCID: PMC6243090
- DOI: 10.3389/fnbot.2018.00074
A Linear Approach to Optimize an EMG-Driven Neuromusculoskeletal Model for Movement Intention Detection in Myo-Control: A Case Study on Shoulder and Elbow Joints
Abstract
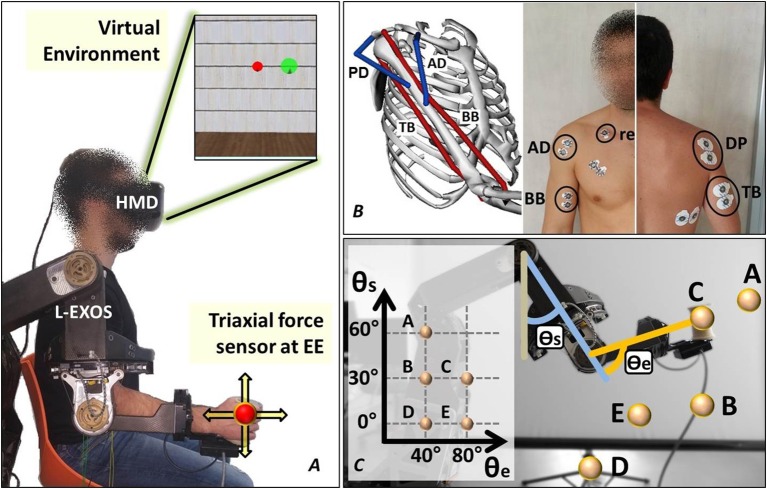
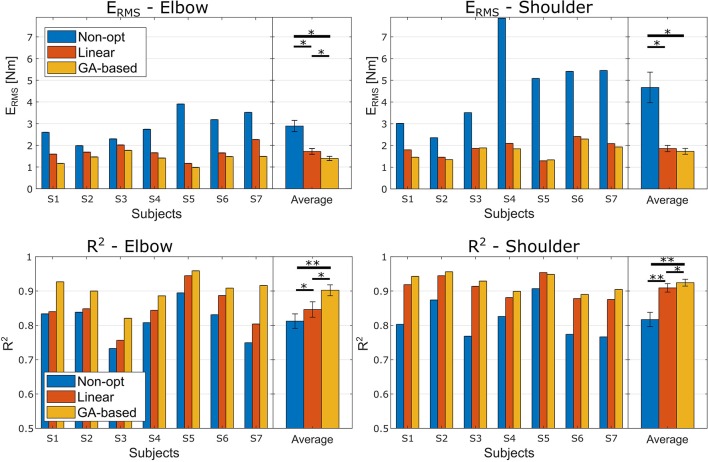
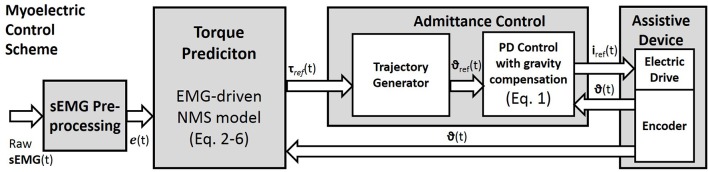
The growing interest of the industry production in wearable robots for assistance and rehabilitation purposes opens the challenge for developing intuitive and natural control strategies. Myoelectric control, or myo-control, which consists in decoding the human motor intent from muscular activity and its mapping into control outputs, represents a natural way to establish an intimate human-machine connection. In this field, model based myo-control schemes (e.g., EMG-driven neuromusculoskeletal models, NMS) represent a valid solution for estimating the moments of the human joints. However, a model optimization is needed to adjust the model's parameters to a specific subject and most of the optimization approaches presented in literature consider complex NMS models that are unsuitable for being used in a control paradigm since they suffer from long-lasting setup and optimization phases. In this work we present a minimal NMS model for predicting the elbow and shoulder torques and we compare two optimization approaches: a linear optimization method (LO) and a non-linear method based on a genetic algorithm (GA). The LO optimizes only one parameter per muscle, whereas the GA-based approach performs a deep customization of the muscle model, adjusting 12 parameters per muscle. EMG and force data have been collected from 7 healthy subjects performing a set of exercises with an arm exoskeleton. Although both optimization methods substantially improved the performance of the raw model, the findings of the study suggest that the LO might be beneficial with respect to GA as the latter is much more computationally heavy and leads to minimal improvements with respect to the former. From the comparison between the two considered joints, it emerged also that the more accurate the NMS model is, the more effective a complex optimization procedure could be. Overall, the two optimized NMS models were able to predict the shoulder and elbow moments with a low error, thus demonstrating the potentiality for being used in an admittance-based myo-control scheme. Thanks to the low computational cost and to the short setup phase required for wearing and calibrating the system, obtained results are promising for being introduced in industrial or rehabilitation real time scenarios.
Keywords: EMG; exoskeleton; genetic algorithm; myo-control; neuromusculoskeletal model; optimization; torque prediction; upper limb.
Figures
Similar articles
-
Feasibility of using EMG driven neuromusculoskeletal model for prediction of dynamic movement of the elbow.J Electromyogr Kinesiol. 2005 Feb;15(1):12-26. doi: 10.1016/j.jelekin.2004.06.007. J Electromyogr Kinesiol. 2005. PMID: 15642650
-
Neuromusculoskeletal model-informed machine learning-based control of a knee exoskeleton with uncertainties quantification.Front Neurosci. 2023 Aug 30;17:1254088. doi: 10.3389/fnins.2023.1254088. eCollection 2023. Front Neurosci. 2023. PMID: 37712095 Free PMC article.
-
Estimation of Joint Torque by EMG-Driven Neuromusculoskeletal Models and LSTM Networks.IEEE Trans Neural Syst Rehabil Eng. 2023;31:3722-3731. doi: 10.1109/TNSRE.2023.3315373. Epub 2023 Sep 22. IEEE Trans Neural Syst Rehabil Eng. 2023. PMID: 37708013
-
Incorporating ultrasound-measured musculotendon parameters to subject-specific EMG-driven model to simulate voluntary elbow flexion for persons after stroke.Clin Biomech (Bristol). 2009 Jan;24(1):101-9. doi: 10.1016/j.clinbiomech.2008.08.008. Epub 2008 Nov 13. Clin Biomech (Bristol). 2009. PMID: 19012998
-
Elucidating Sensorimotor Control Principles with Myoelectric Musculoskeletal Models.Front Hum Neurosci. 2017 Nov 10;11:531. doi: 10.3389/fnhum.2017.00531. eCollection 2017. Front Hum Neurosci. 2017. PMID: 29176944 Free PMC article. Review.
Cited by
-
Multi-branch deep learning neural network prediction model for the development of angular biosensors based on sEMG.Front Bioeng Biotechnol. 2024 Oct 11;12:1492232. doi: 10.3389/fbioe.2024.1492232. eCollection 2024. Front Bioeng Biotechnol. 2024. PMID: 39465001 Free PMC article.
-
How Many Muscles? Optimal Muscles Set Search for Optimizing Myocontrol Performance.Front Comput Neurosci. 2021 Oct 7;15:668579. doi: 10.3389/fncom.2021.668579. eCollection 2021. Front Comput Neurosci. 2021. PMID: 34690729 Free PMC article.
-
A Differentiable Dynamic Model for Musculoskeletal Simulation and Exoskeleton Control.Biosensors (Basel). 2022 May 9;12(5):312. doi: 10.3390/bios12050312. Biosensors (Basel). 2022. PMID: 35624613 Free PMC article.
-
Myoelectric Control Systems for Upper Limb Wearable Robotic Exoskeletons and Exosuits-A Systematic Review.Sensors (Basel). 2022 Oct 24;22(21):8134. doi: 10.3390/s22218134. Sensors (Basel). 2022. PMID: 36365832 Free PMC article.
-
A multi-resolution physics-informed recurrent neural network: formulation and application to musculoskeletal systems.Comput Mech. 2024;73(5):1125-1145. doi: 10.1007/s00466-023-02403-x. Epub 2023 Oct 20. Comput Mech. 2024. PMID: 38699409 Free PMC article.
References
-
- Barsotti M., Leonardis D., Loconsole C., Solazzi M., Sotgiu E., Procopio C., et al. (2015). A full upper limb robotic exoskeleton for reaching and grasping rehabilitation triggered by mi-bci, in Rehabilitation Robotics (ICORR), 2015 IEEE International Conference on (Singapore: IEEE; ) 49–54.
-
- Bostelman R., Messina E., Foufou S. (2017). Cross-industry standard test method developments: from manufacturing to wearable robots. Front. Inf. Technol. Electronic Eng. 18:1447 10.1631/FITEE.1601316 - DOI
LinkOut - more resources
Full Text Sources