

Multiresponsive polymeric microstructures with encoded predetermined and self-regulated deformability
- PMID: 30514819
- PMCID: PMC6304948
- DOI: 10.1073/pnas.1811823115
Multiresponsive polymeric microstructures with encoded predetermined and self-regulated deformability
Abstract
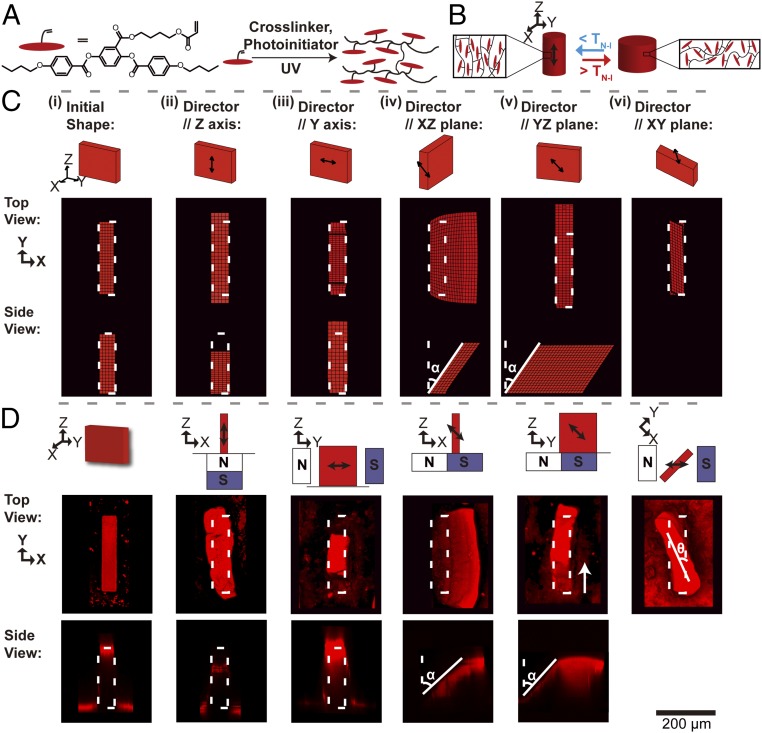
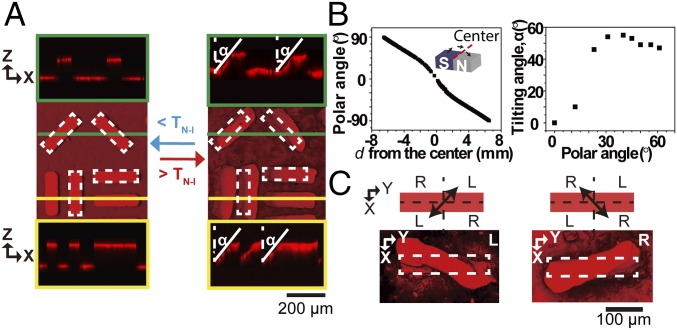
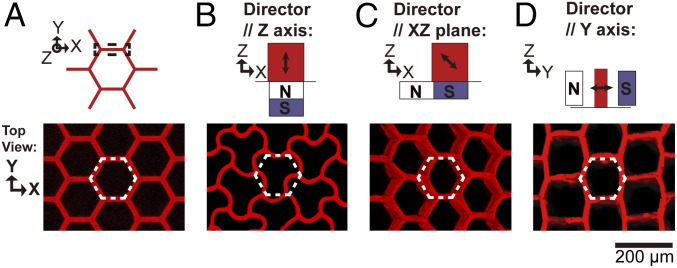
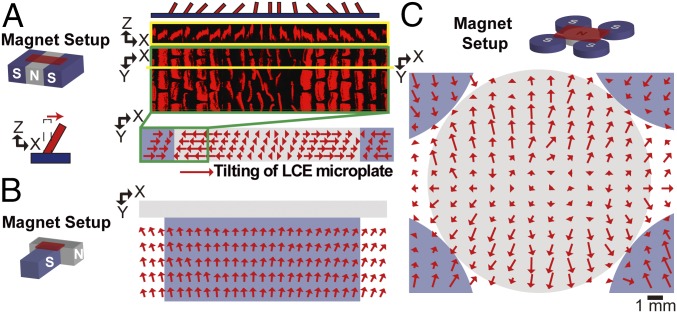
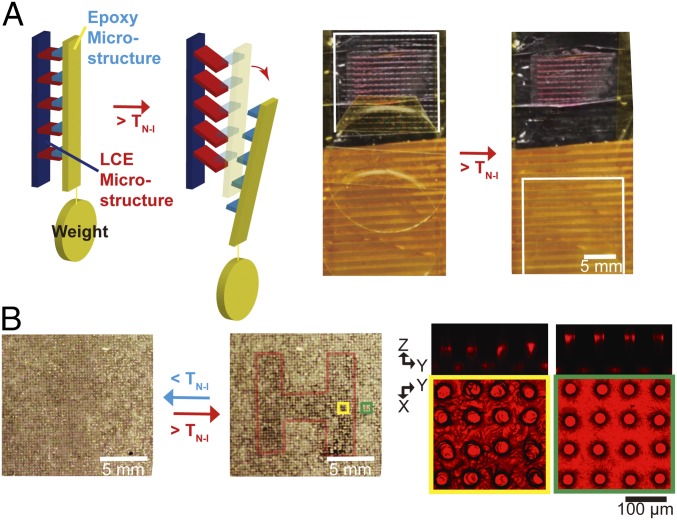
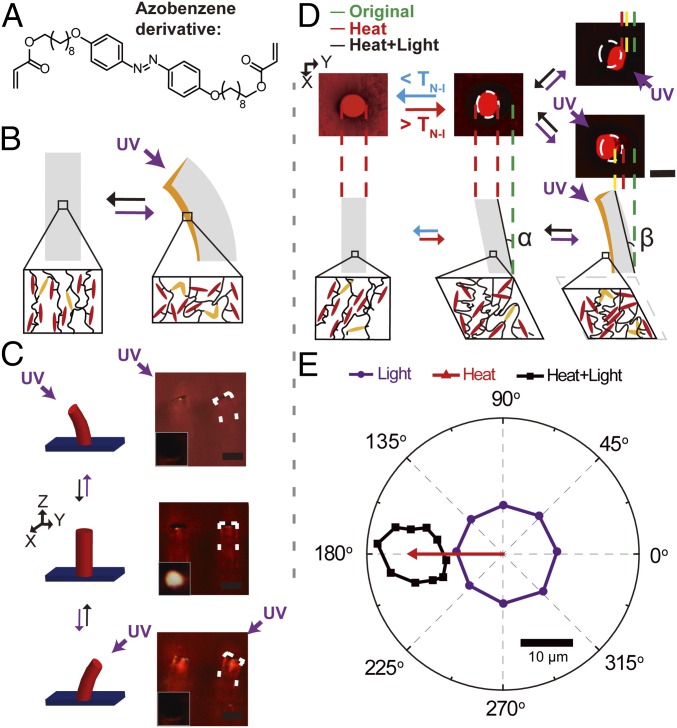
Dynamic functions of biological organisms often rely on arrays of actively deformable microstructures undergoing a nearly unlimited repertoire of predetermined and self-regulated reconfigurations and motions, most of which are difficult or not yet possible to achieve in synthetic systems. Here, we introduce stimuli-responsive microstructures based on liquid-crystalline elastomers (LCEs) that display a broad range of hierarchical, even mechanically unfavored deformation behaviors. By polymerizing molded prepolymer in patterned magnetic fields, we encode any desired uniform mesogen orientation into the resulting LCE microstructures, which is then read out upon heating above the nematic-isotropic transition temperature (TN-I) as a specific prescribed deformation, such as twisting, in- and out-of-plane tilting, stretching, or contraction. By further introducing light-responsive moieties, we demonstrate unique multifunctionality of the LCEs capable of three actuation modes: self-regulated bending toward the light source at T < TN-I, magnetic-field-encoded predetermined deformation at T > TN-I, and direction-dependent self-regulated motion toward the light at T > TN-I We develop approaches to create patterned arrays of microstructures with encoded multiple area-specific deformation modes and show their functions in responsive release of cargo, image concealment, and light-controlled reflectivity. We foresee that this platform can be widely applied in switchable adhesion, information encryption, autonomous antennae, energy harvesting, soft robotics, and smart buildings.
Keywords: actuators; autonomous materials multifunctionality; liquid-crystal elastomers.
Copyright © 2018 the Author(s). Published by PNAS.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Vukusic P, Sambles JR, Lawrence CR, Wootton RJ. Structural colour. Now you see it–Now you don’t. Nature. 2001;410:36. - PubMed
-
- Xia F, Jiang L. Bio-inspired, smart, multiscale interfacial materials. Adv Mater. 2008;20:2842–2858.
-
- Autumn K, et al. Adhesive force of a single gecko foot-hair. Nature. 2000;405:681–685. - PubMed
-
- Erb RM, Sander JS, Grisch R, Studart AR. Self-shaping composites with programmable bioinspired microstructures. Nat Commun. 2013;4:1712. - PubMed
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
