

Closed-loop functional optogenetic stimulation
- PMID: 30546051
- PMCID: PMC6294002
- DOI: 10.1038/s41467-018-07721-w
Closed-loop functional optogenetic stimulation
Abstract
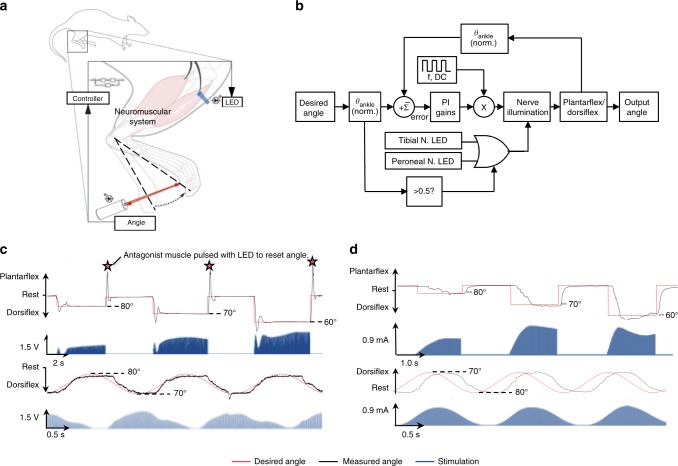
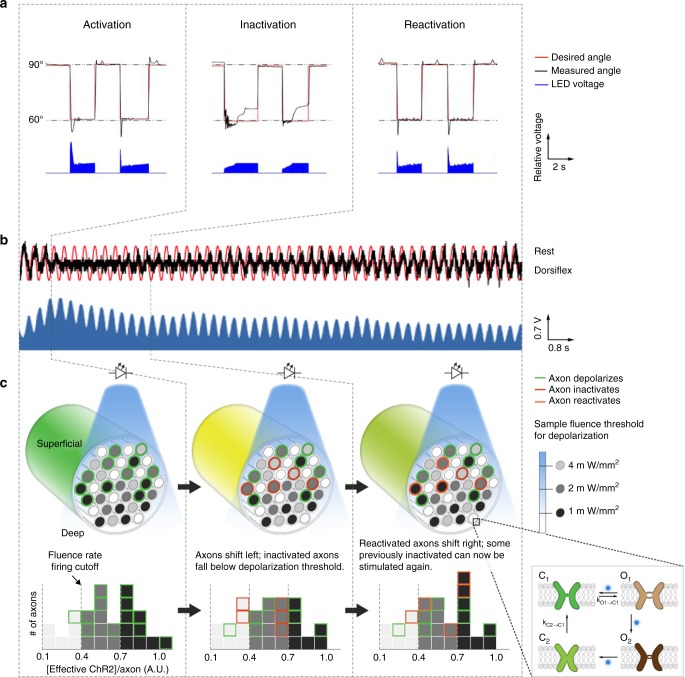
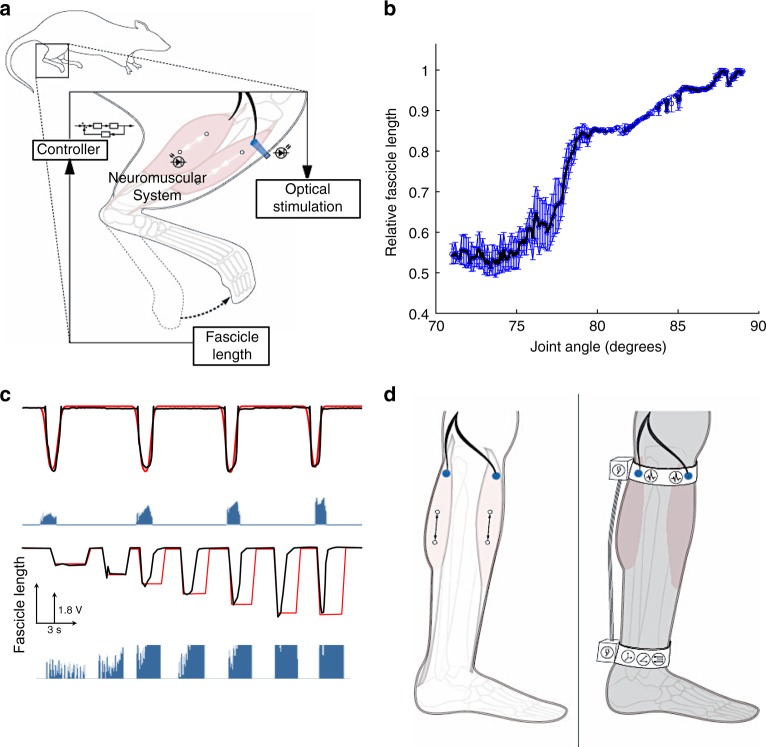
Optogenetics has been used to orchestrate temporal- and tissue-specific control of neural tissues and offers a wealth of unique advantages for neuromuscular control. Here, we establish a closed-loop functional optogenetic stimulation (CL-FOS) system to control ankle joint position in murine models. Using the measurement of either joint angle or fascicle length as a feedback signal, we compare the controllability of CL-FOS to closed-loop functional electrical stimulation (CL-FES) and demonstrate significantly greater accuracy, lower rise times and lower overshoot percentages. We demonstrate orderly recruitment of motor units and reduced fatigue when performing cyclical movements with CL-FOS compared with CL-FES. We develop and investigate a 3-phase, photo-kinetic model to elucidate the underlying mechanisms for temporal variations in optogenetically activated neuromusculature during closed-loop control experiments. Methods and insights from this study lay the groundwork for the development of closed-loop optogenetic neuromuscular stimulation therapies and devices for peripheral limb control.
Conflict of interest statement
The authors declare no competing interests.
Figures

References
-
- da L. dos Santos. E, et al. Artificial motor control for electrically stimulated upper limbs of plegic or paretic people. Res. Biomed. Eng. 2016;32:199–211. doi: 10.1590/2446-4740.03415. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Miscellaneous
