

Jacobian-Based Task-Space Motion Planning for MRI-Actuated Continuum Robots
- PMID: 30547093
- PMCID: PMC6287617
- DOI: 10.1109/LRA.2018.2881987
Jacobian-Based Task-Space Motion Planning for MRI-Actuated Continuum Robots
Abstract
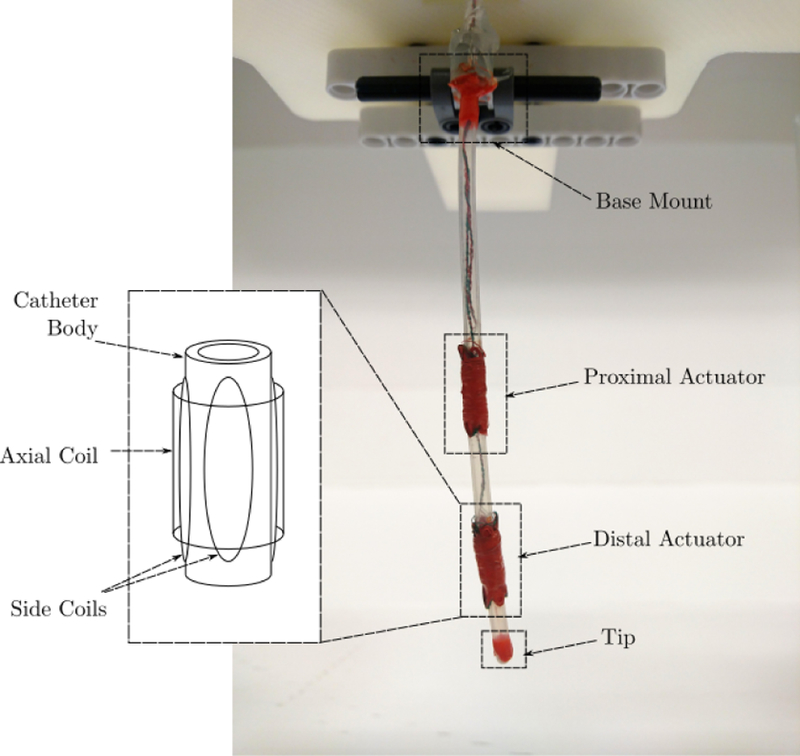
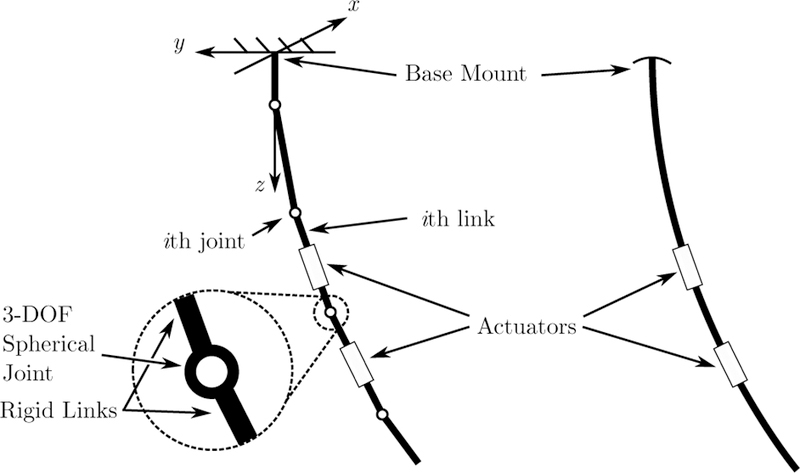
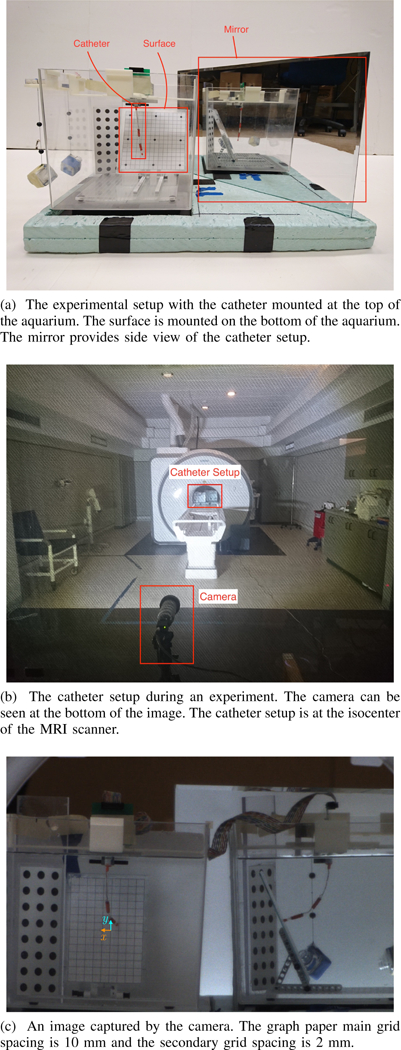
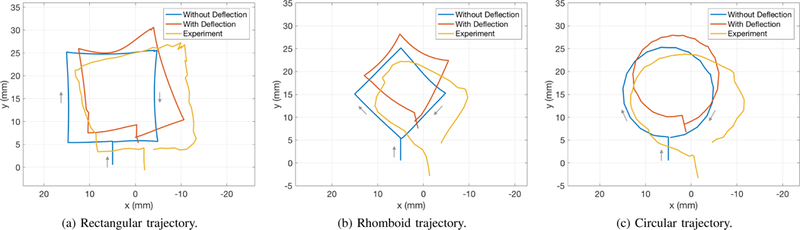
Robot-assisted medical interventions, such as robotic catheter ablation, often require the robot to perform tasks on a tissue surface. This paper presents a task-space motion planning method that generates actuation trajectories which steer the end- effector of the MRI-actuated robot along desired trajectories on the surface. The continuum robot is modeled using the pseudo-rigid-body model, where the continuum body of the robot is approximated by rigid links joined by flexible joints. The quasistatic motion model of the robot is formulated as a potential energy minimization problem. The Jacobian of the quasistatic motion model is used in calculating the actuations that steer the tip in the desired directions. The proposed method is validated experimentally in a clinical 3-T MRI scanner.
Keywords: Surgical Robotics: Planning; Surgical Robotics: Steerable Catheters/Needles.
Figures
References
-
- Murray RM, Li Z, and Sastry SS, A Mathematical Introduction to Robotic Manipulation, 1st ed. CRC Press, March 1994.
-
- Burgner-Kahrs J, Rucker DC, and Choset H, “Continuum robots for medical applications: A survey,” IEEE Transactions on Robotics, vol. 31, no. 6, pp. 1261–1280, 2015.
-
- Hannan MW and Walker ID, “Kinematics and the implementation of an elephant’s trunk manipulator and other continuum style robots,” Journal of Field Robotics, vol. 20, no. 2, pp. 45–63, 2003. - PubMed
-
- Gravagne IA, Rahn CD, and Walker ID, “Large deflection dynamics and control for planar continuum robots,” IEEE/ASME Transactions on Mechatronics, vol. 8, no. 2, pp. 299–307, 2003.
Grants and funding
LinkOut - more resources
Full Text Sources