

Depth from a Motion Algorithm and a Hardware Architecture for Smart Cameras
- PMID: 30583606
- PMCID: PMC6338951
- DOI: 10.3390/s19010053
Depth from a Motion Algorithm and a Hardware Architecture for Smart Cameras
Abstract
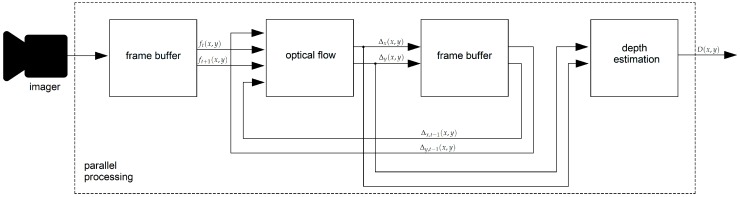
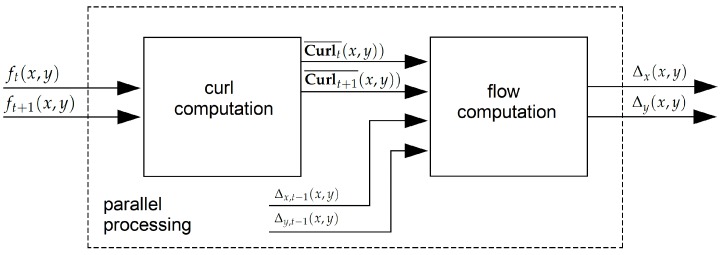
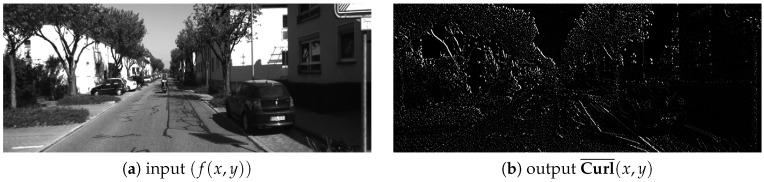
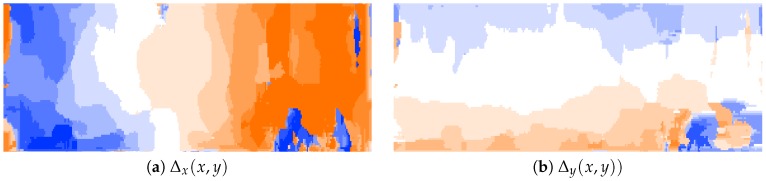
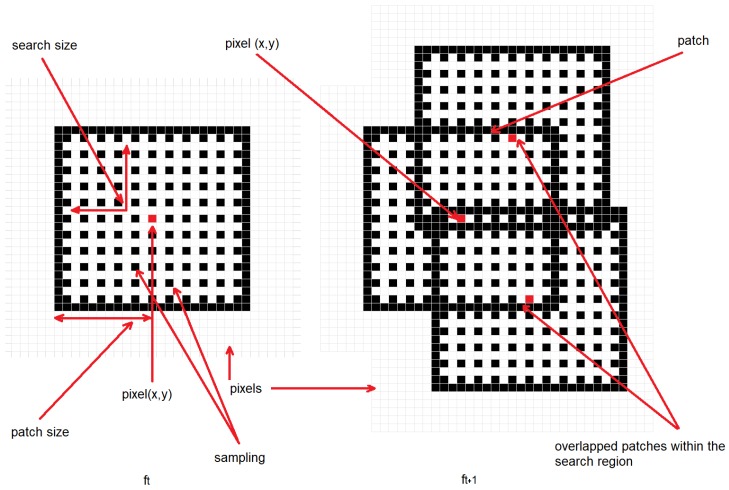
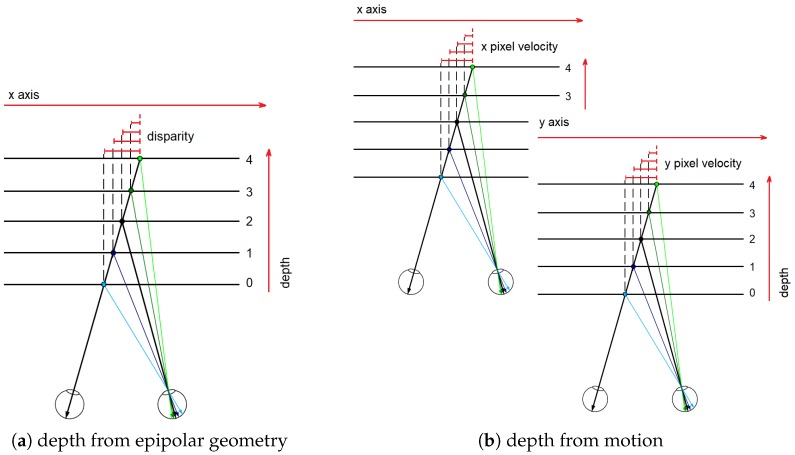
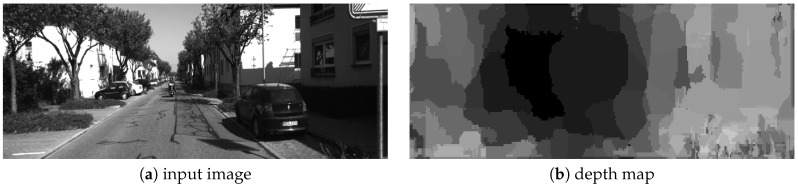
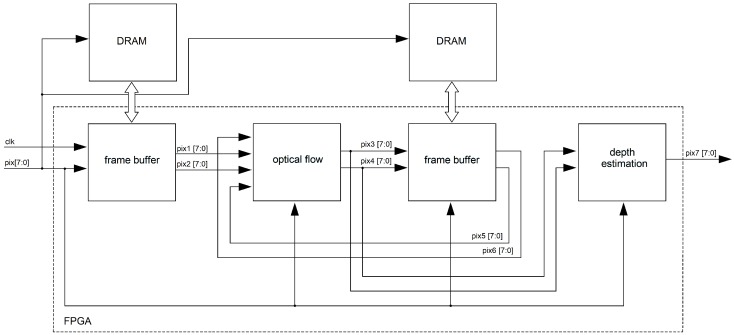
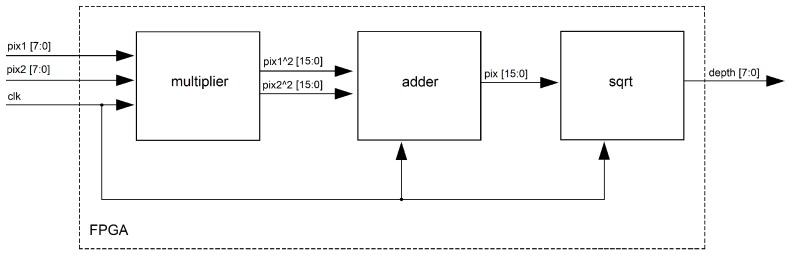
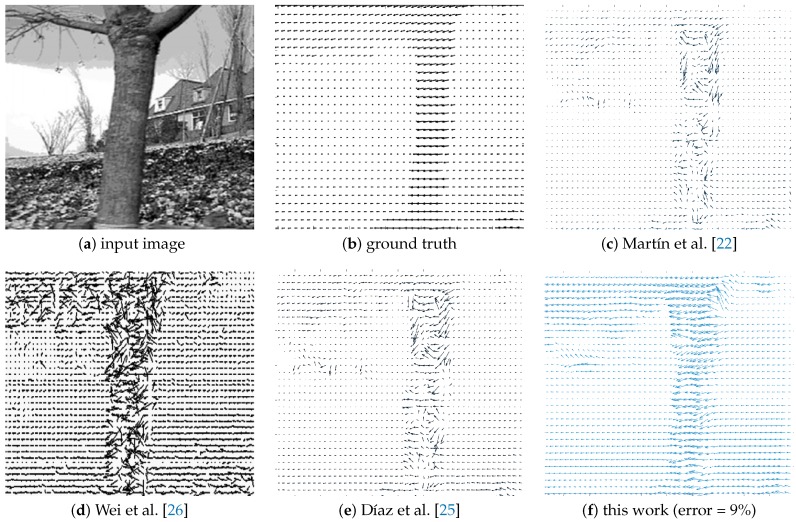
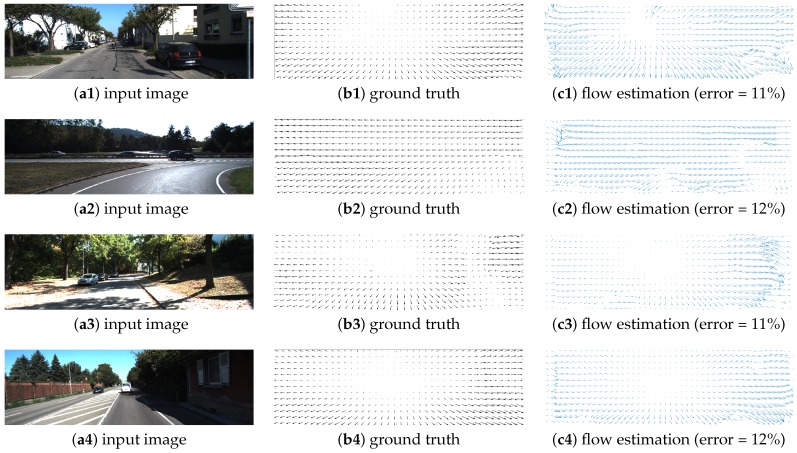
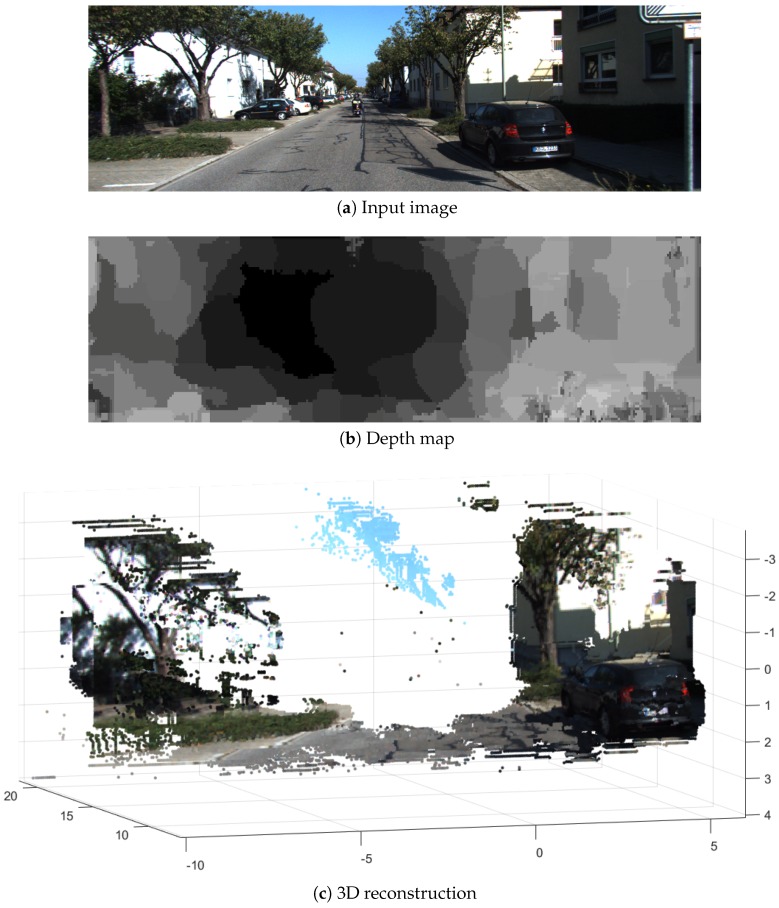
Applications such as autonomous navigation, robot vision, and autonomous flying require depth map information of a scene. Depth can be estimated by using a single moving camera (depth from motion). However, the traditional depth from motion algorithms have low processing speeds and high hardware requirements that limit the embedded capabilities. In this work, we propose a hardware architecture for depth from motion that consists of a flow/depth transformation and a new optical flow algorithm. Our optical flow formulation consists in an extension of the stereo matching problem. A pixel-parallel/window-parallel approach where a correlation function based on the sum of absolute difference (SAD) computes the optical flow is proposed. Further, in order to improve the SAD, the curl of the intensity gradient as a preprocessing step is proposed. Experimental results demonstrated that it is possible to reach higher accuracy (90% of accuracy) compared with previous Field Programmable Gate Array (FPGA)-based optical flow algorithms. For the depth estimation, our algorithm delivers dense maps with motion and depth information on all image pixels, with a processing speed up to 128 times faster than that of previous work, making it possible to achieve high performance in the context of embedded applications.
Keywords: FPGA (Field Programmable Gate Array); depth estimation; monocular systems; optical flow; smart cameras.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

Similar articles
-
Motion-Based Object Location on a Smart Image Sensor Using On-Pixel Memory.Sensors (Basel). 2022 Aug 30;22(17):6538. doi: 10.3390/s22176538. Sensors (Basel). 2022. PMID: 36080999 Free PMC article.
-
SAD-based stereo vision machine on a System-on-Programmable-Chip (SoPC).Sensors (Basel). 2013 Mar 4;13(3):3014-27. doi: 10.3390/s130303014. Sensors (Basel). 2013. PMID: 23459385 Free PMC article.
-
Real-Time FPGA Accelerated Stereo Matching for Temporal Statistical Pattern Projector Systems.Sensors (Basel). 2021 Sep 26;21(19):6435. doi: 10.3390/s21196435. Sensors (Basel). 2021. PMID: 34640755 Free PMC article.
-
Pix2Pix-Based Monocular Depth Estimation for Drones with Optical Flow on AirSim.Sensors (Basel). 2022 Mar 8;22(6):2097. doi: 10.3390/s22062097. Sensors (Basel). 2022. PMID: 35336268 Free PMC article.
-
Survey of Datafusion Techniques for Laser and Vision Based Sensor Integration for Autonomous Navigation.Sensors (Basel). 2020 Apr 12;20(8):2180. doi: 10.3390/s20082180. Sensors (Basel). 2020. PMID: 32290582 Free PMC article. Review.
Cited by
-
High Level 3D Structure Extraction from a Single Image Using a CNN-Based Approach.Sensors (Basel). 2019 Jan 29;19(3):563. doi: 10.3390/s19030563. Sensors (Basel). 2019. PMID: 30700031 Free PMC article.
-
Multi-Scale Spatio-Temporal Feature Extraction and Depth Estimation from Sequences by Ordinal Classification.Sensors (Basel). 2020 Apr 1;20(7):1979. doi: 10.3390/s20071979. Sensors (Basel). 2020. PMID: 32244820 Free PMC article.
References
-
- Hengstler S., Prashanth D., Fong S., Aghajan H. MeshEye: A hybrid-resolution smart camera mote for applications in distributed intelligent surveillance; Proceedings of the 6th International Conference on Information Processing in Sensor Networks; Cambridge, MA, USA. 25–27 April 2007; pp. 360–369.
-
- Aguilar-González A., Arias-Estrada M. Towards a smart camera for monocular SLAM; Proceedings of the 10th International Conference on Distributed Smart Camera; Paris, France. 12–15 September 2016; pp. 128–135.
-
- Carey S.J., Barr D.R., Dudek P. Low power high-performance smart camera system based on SCAMP vision sensor. J. Syst. Archit. 2013;59:889–899. doi: 10.1016/j.sysarc.2013.03.016. - DOI
-
- Birem M., Berry F. DreamCam: A modular FPGA-based smart camera architecture. J. Syst. Archit. 2014;60:519–527. doi: 10.1016/j.sysarc.2014.01.006. - DOI
-
- Bourrasset C., Maggianiy L., Sérot J., Berry F., Pagano P. Distributed FPGA-based smart camera architecture for computer vision applications; Proceedings of the 2013 Seventh International Conference on Distributed Smart Cameras (ICDSC); Palm Springs, CA, USA. 29 October–1 November 2013; pp. 1–2.
LinkOut - more resources
Full Text Sources
