

Chronology of motor-mediated microtubule streaming
- PMID: 30601119
- PMCID: PMC6338466
- DOI: 10.7554/eLife.39694
Chronology of motor-mediated microtubule streaming
Abstract
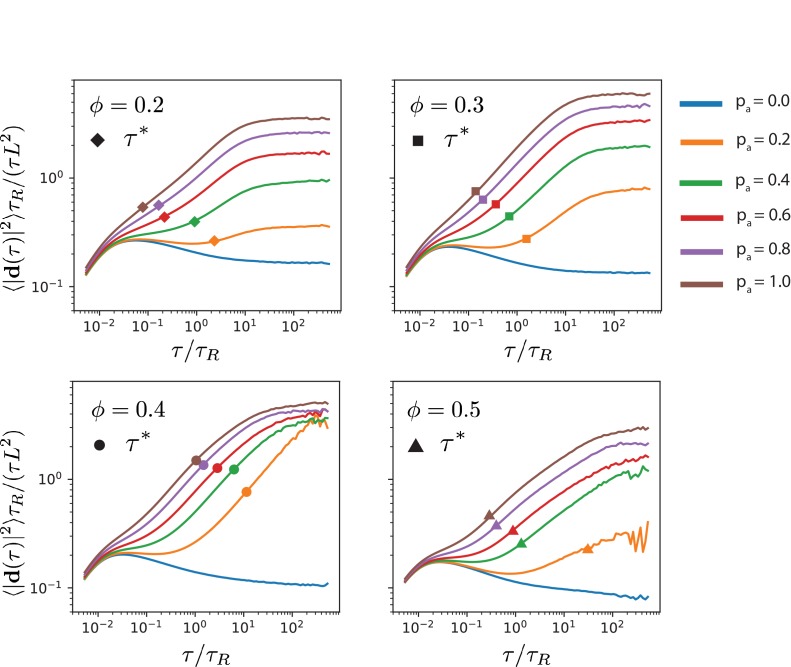
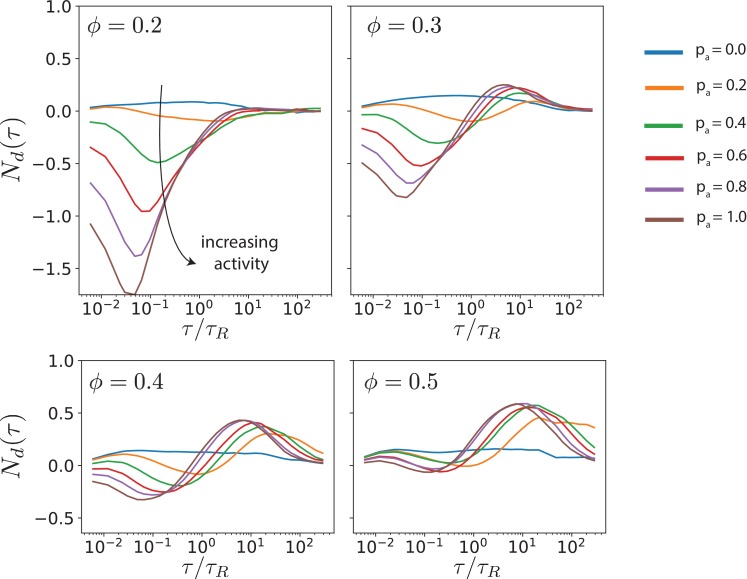
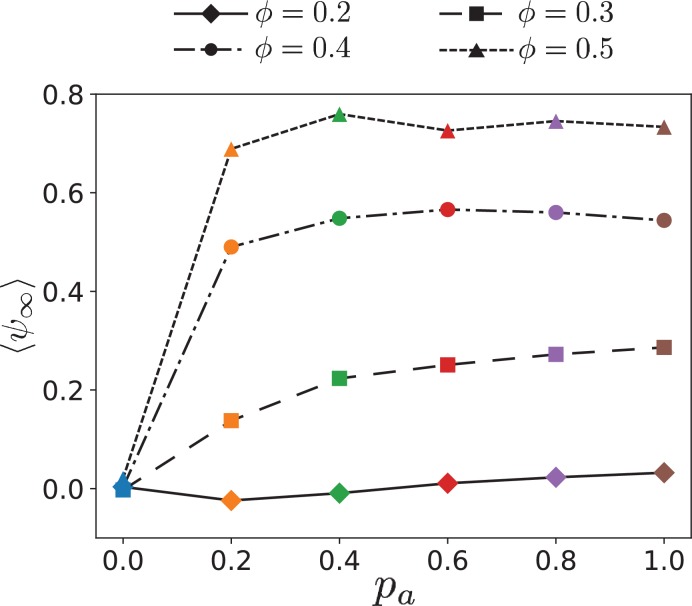
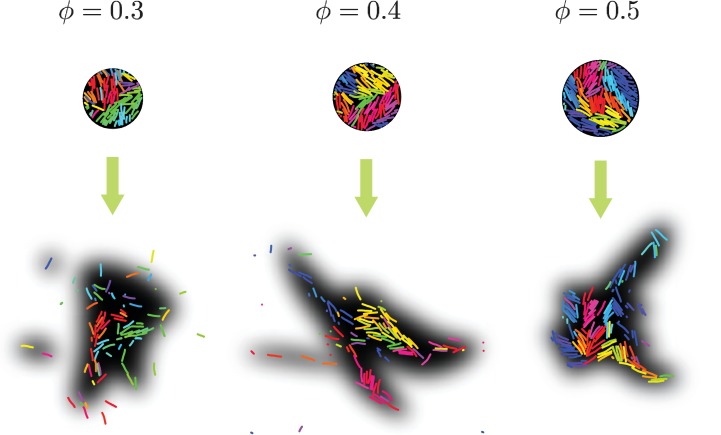
We introduce a filament-based simulation model for coarse-grained, effective motor-mediated interaction between microtubule pairs to study the time-scales that compose cytoplasmic streaming. We characterise microtubule dynamics in two-dimensional systems by chronologically arranging five distinct processes of varying duration that make up streaming, from microtubule pairs to collective dynamics. The structures found were polarity sorted due to the propulsion of antialigned microtubules. This also gave rise to the formation of large polar-aligned domains, and streaming at the domain boundaries. Correlation functions, mean squared displacements, and velocity distributions reveal a cascade of processes ultimately leading to microtubule streaming and advection, spanning multiple microtubule lengths. The characteristic times for the processes extend over three orders of magnitude from fast single-microtubule processes to slow collective processes. Our approach can be used to directly test the importance of molecular components, such as motors and crosslinking proteins between microtubules, on the collective dynamics at cellular scale.
Keywords: cell biology; computational biology; computer simulations; cytoskeletal streaming; kinesin; microtubules; molecular motors; systems biology.
© 2019, Ravichandran et al.
Conflict of interest statement
AR, ÖD, MH, GS, GV, TA, GG No competing interests declared
Figures
























Similar articles
-
Cytoplasmic streaming in Drosophila oocytes varies with kinesin activity and correlates with the microtubule cytoskeleton architecture.Proc Natl Acad Sci U S A. 2012 Sep 18;109(38):15109-14. doi: 10.1073/pnas.1203575109. Epub 2012 Sep 4. Proc Natl Acad Sci U S A. 2012. PMID: 22949706 Free PMC article.
-
Microtubule-microtubule sliding by kinesin-1 is essential for normal cytoplasmic streaming in Drosophila oocytes.Proc Natl Acad Sci U S A. 2016 Aug 23;113(34):E4995-5004. doi: 10.1073/pnas.1522424113. Epub 2016 Aug 10. Proc Natl Acad Sci U S A. 2016. PMID: 27512034 Free PMC article.
-
A Mechanism for Cytoplasmic Streaming: Kinesin-Driven Alignment of Microtubules and Fast Fluid Flows.Biophys J. 2016 May 10;110(9):2053-65. doi: 10.1016/j.bpj.2016.03.036. Biophys J. 2016. PMID: 27166813 Free PMC article.
-
Cytoplasmic Streaming in the Drosophila Oocyte.Annu Rev Cell Dev Biol. 2016 Oct 6;32:173-195. doi: 10.1146/annurev-cellbio-111315-125416. Epub 2016 Jun 24. Annu Rev Cell Dev Biol. 2016. PMID: 27362645 Review.
-
Why are ATP-driven microtubule minus-end directed motors critical to plants? An overview of plant multifunctional kinesins.Funct Plant Biol. 2020 May;47(6):524-536. doi: 10.1071/FP19177. Funct Plant Biol. 2020. PMID: 32336322 Review.
Cited by
-
Growth rate-dependent flexural rigidity of microtubules influences pattern formation in collective motion.J Nanobiotechnology. 2021 Jul 19;19(1):218. doi: 10.1186/s12951-021-00960-y. J Nanobiotechnology. 2021. PMID: 34281555 Free PMC article.
-
Effects of spatial dimensionality and steric interactions on microtubule-motor self-organization.Phys Biol. 2019 Apr 23;16(4):046004. doi: 10.1088/1478-3975/ab0fb1. Phys Biol. 2019. PMID: 31013252 Free PMC article.
References
-
- Bates MA, Frenkel D. Phase behavior of two-dimensional hard rod fluids. The Journal of Chemical Physics. 2000;112:10034–10041. doi: 10.1063/1.481637. - DOI
Publication types
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources
