

Can treadmill-slip perturbation training reduce immediate risk of over-ground-slip induced fall among community-dwelling older adults?
- PMID: 30616984
- PMCID: PMC6361674
- DOI: 10.1016/j.jbiomech.2018.12.017
Can treadmill-slip perturbation training reduce immediate risk of over-ground-slip induced fall among community-dwelling older adults?
Abstract
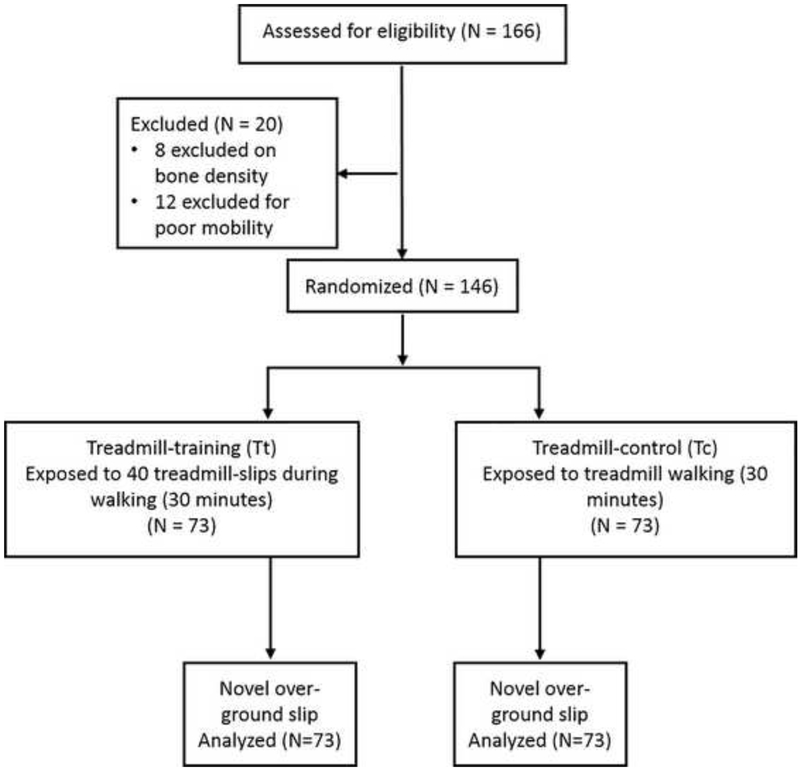
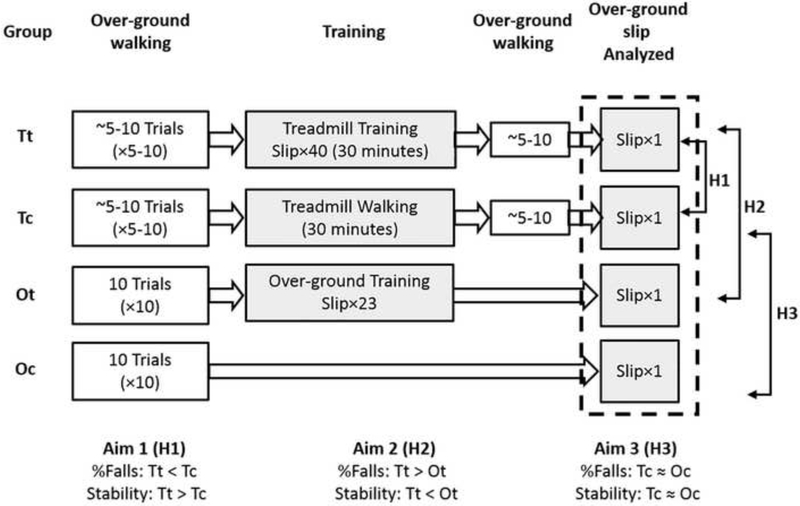
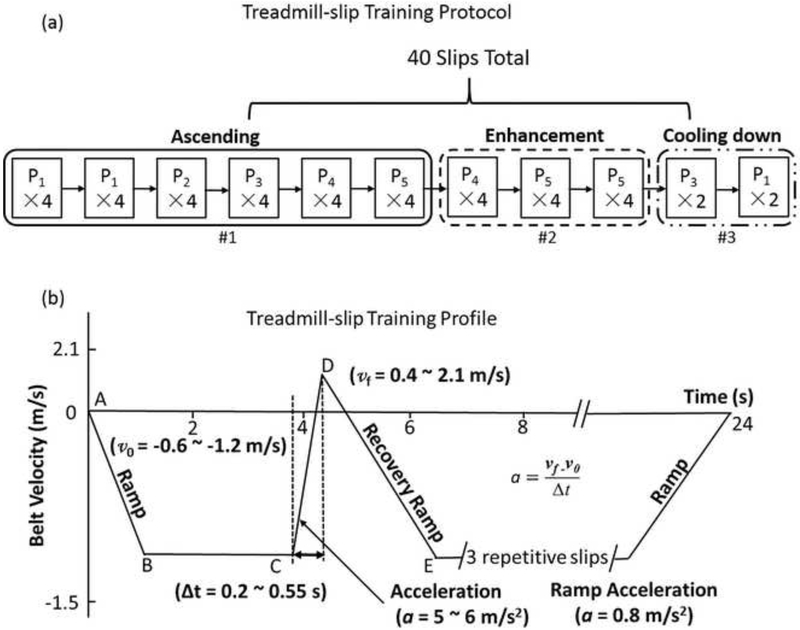
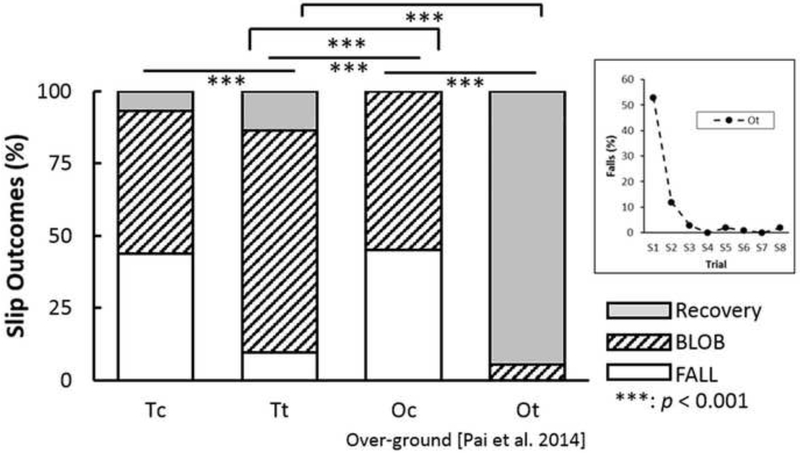
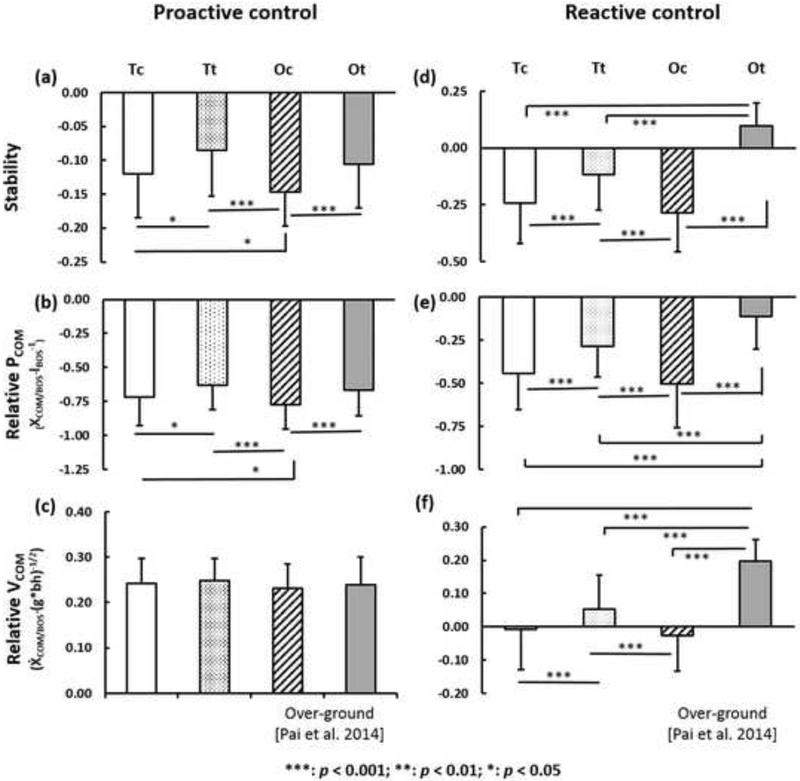
The purpose of this study was to determine any potential falls-resistance benefits that might arise from treadmill-slip-perturbation training. One hundred sixty-six healthy community-dwelling older adults were randomly assigned to either the treadmill-slip-training group (Tt) or the treadmill-control group (Tc). Tt received 40 slip-like perturbations during treadmill walking. Tc received unperturbed treadmill walking for 30 min. Following their treadmill session, both groups were exposed to a novel slip during over-ground walking. Their responses to this novel slip were also compared to previously collected data from participants who received either over-ground-slip training (Ot) with 24 slips or over-ground walking (Oc) with no training before experiencing their novel over-ground slip. Fall rates and both proactive (pre-slip) and reactive (post-slip) stability were assessed and compared for the novel over-ground slip in groups Tt, Tc, and Oc, as well as for the 24th slip in Ot. Results showed Tt had fewer falls than Tc (9.6% versus 43.8%, p < 0.001) but more falls than Ot (9.6% versus 0%, p < 0.001). Tt also had greater proactive and reactive stability than Tc (Tt > Tc, p < 0.01), however, Tt's stabilities were lower than those of Ot (p < 0.01). There was no difference in fall-rate or reactive stability between Tc and Oc, though treadmill walking did improve the proactive stability control of the latter. While the treadmill-slip-training protocol could immediately reduce the numbers of falls from a novel laboratory-reproduced slip, such improvements were far less than that from the motor adaptation to the over-ground-slip-training protocol.
Keywords: Balance; Motor generalization; Slip perturbation; Stability; Treadmill.
Copyright © 2018 Elsevier Ltd. All rights reserved.
Conflict of interest statement
Figures
References
-
- Bhatt T, Espy D, Yang F, & Pai Y-C (2011). Dynamic gait stability, clinical correlates, and prognosis of falls among community-dwelling older adults. Arch Phys Med Rehabil, 92(5), 799–805. - PubMed
-
- Bhatt T, Wening JD, & Pai YC (2006). Adaptive control of gait stability in reducing slip-related backward loss of balance. Exp Brain Res, 170(1), 61–73. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
