

Locomotion as a Powerful Model to Study Integrative Physiology: Efficiency, Economy, and Power Relationship
- PMID: 30618802
- PMCID: PMC6297284
- DOI: 10.3389/fphys.2018.01789
Locomotion as a Powerful Model to Study Integrative Physiology: Efficiency, Economy, and Power Relationship
Abstract
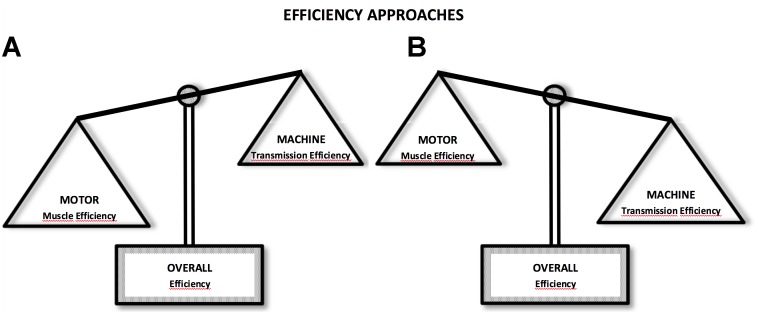
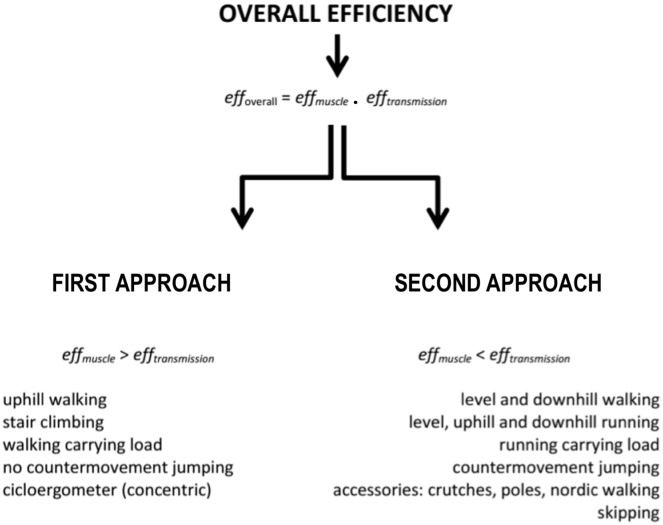
Locomotion is the most common form of movement in nature. Its study allows analysis of interactions between muscle functions (motor) and lever system arrangements (transmission), thereby facilitating performance analysis of various body organs and systems. Thus, it is a powerful model to study various aspects of integrative physiology. The results of this model can be applied in understanding body functions and design principles as performance outputs of interest for medical and biological sciences. The overall efficiency (effoverall ) during locomotion is an example of an integrative parameter, which results from the ratio between mechanical output and metabolic input. Although the concepts of cost (i.e., metabolic expenditure relative to distance) and power (i.e., metabolic expenditure relative to time) are included in its calculation, the effoverall establishes peculiar relations with these variables. For a better approach to these aspects, in this study, we presented the physical-mathematical formulation of efficiency, as well as its conceptual definitions and applications. Furthermore, the concepts of efficiency, cost, and power are discussed from the biological and medical perspectives. Terrestrial locomotion is a powerful model to study integrative physiology in humans, because by analyzing the mechanical and metabolic determinants, we may verify the efficiency and economy relationship through locomotion type, and its characteristics and restrictions. Thus, it is possible to elaborate further on various improved intervention strategies, such as physical training, competition strategies, and ergogenic supplementation.
Keywords: economy; efficiency; gait; mechanical work; metabolic cost; optimal walking speed; self-selected walking speed.
Figures
References
LinkOut - more resources
Full Text Sources