Local deformation and stiffness distribution in fly wings
- PMID: 30642916
- PMCID: PMC6361194
- DOI: 10.1242/bio.038299
Local deformation and stiffness distribution in fly wings
Abstract
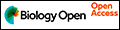
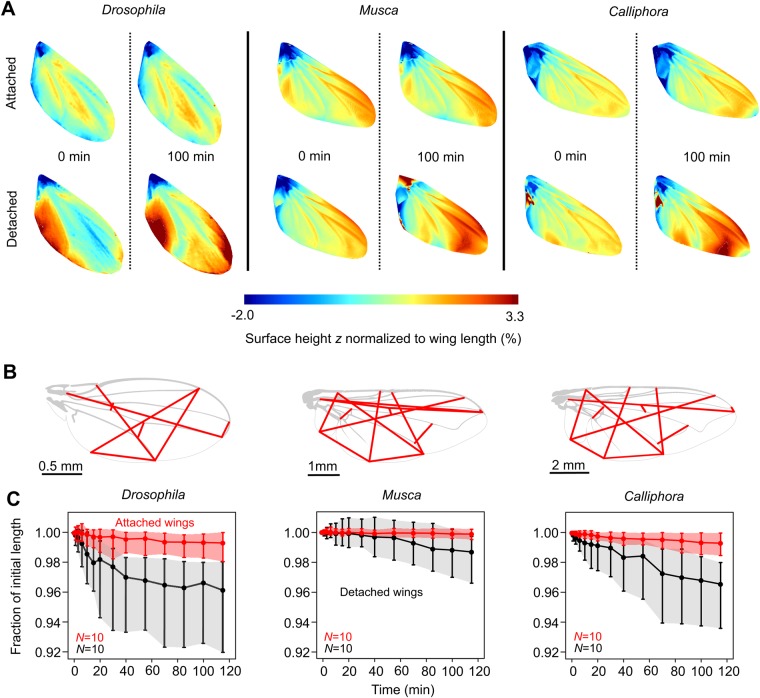
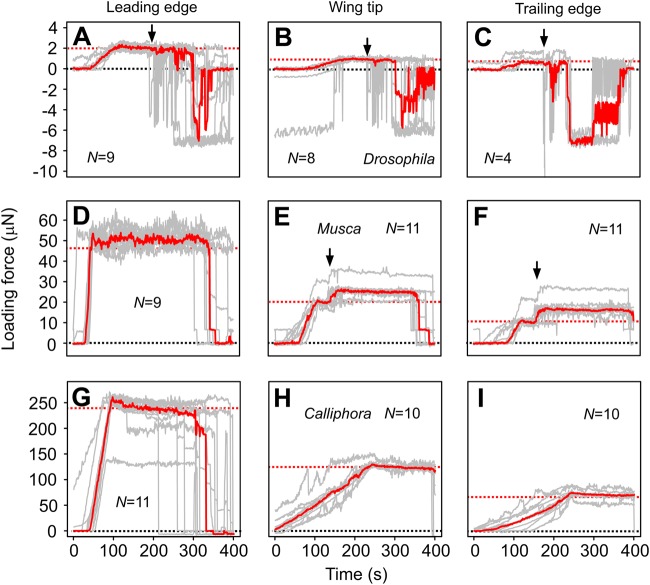
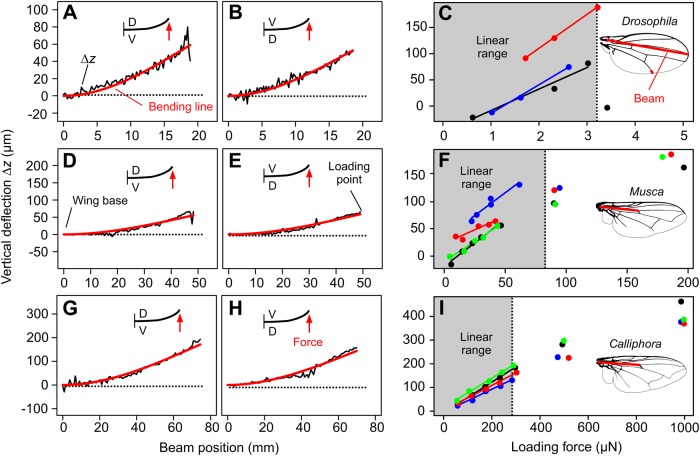
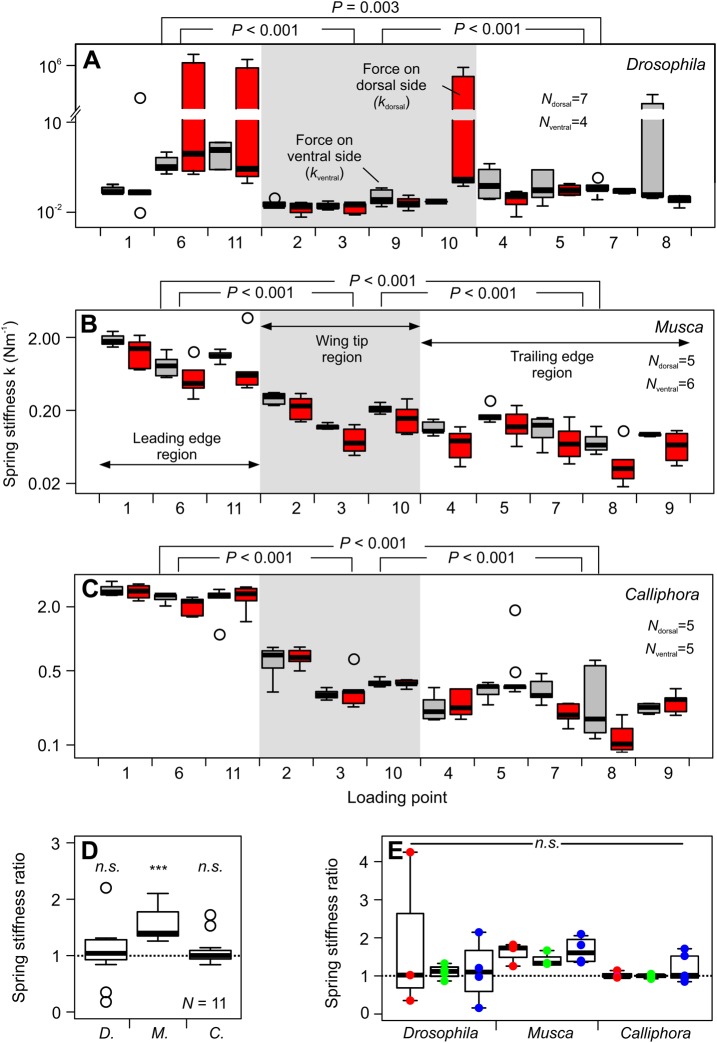
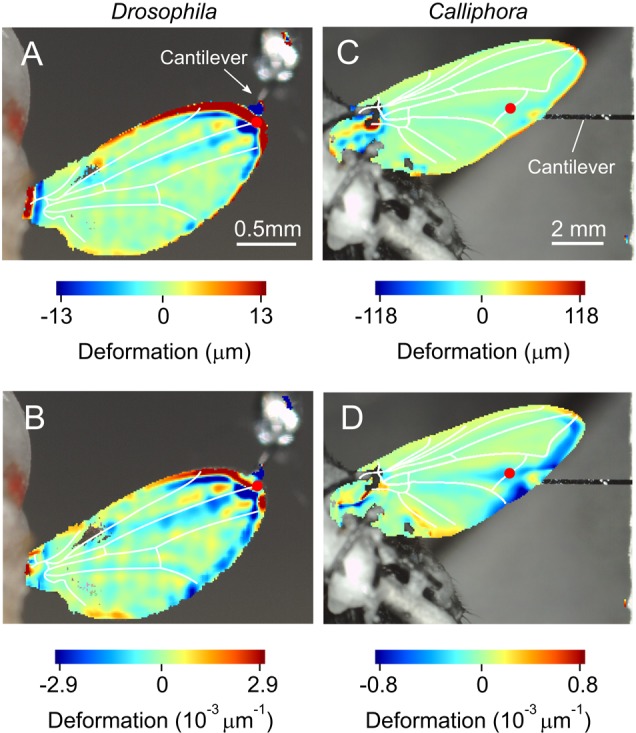
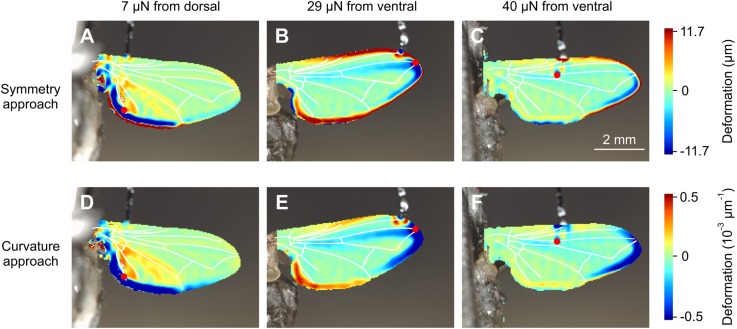
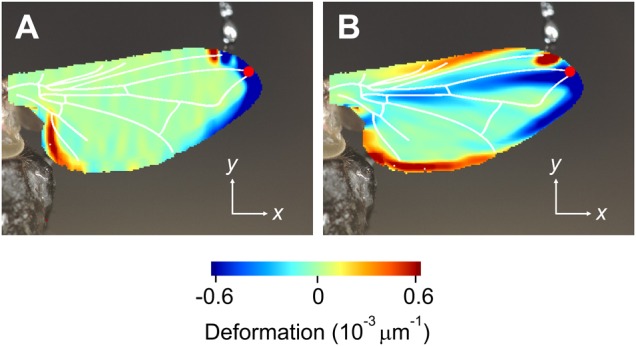
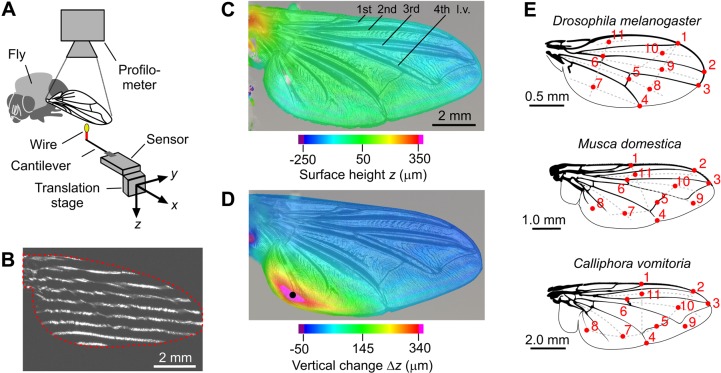
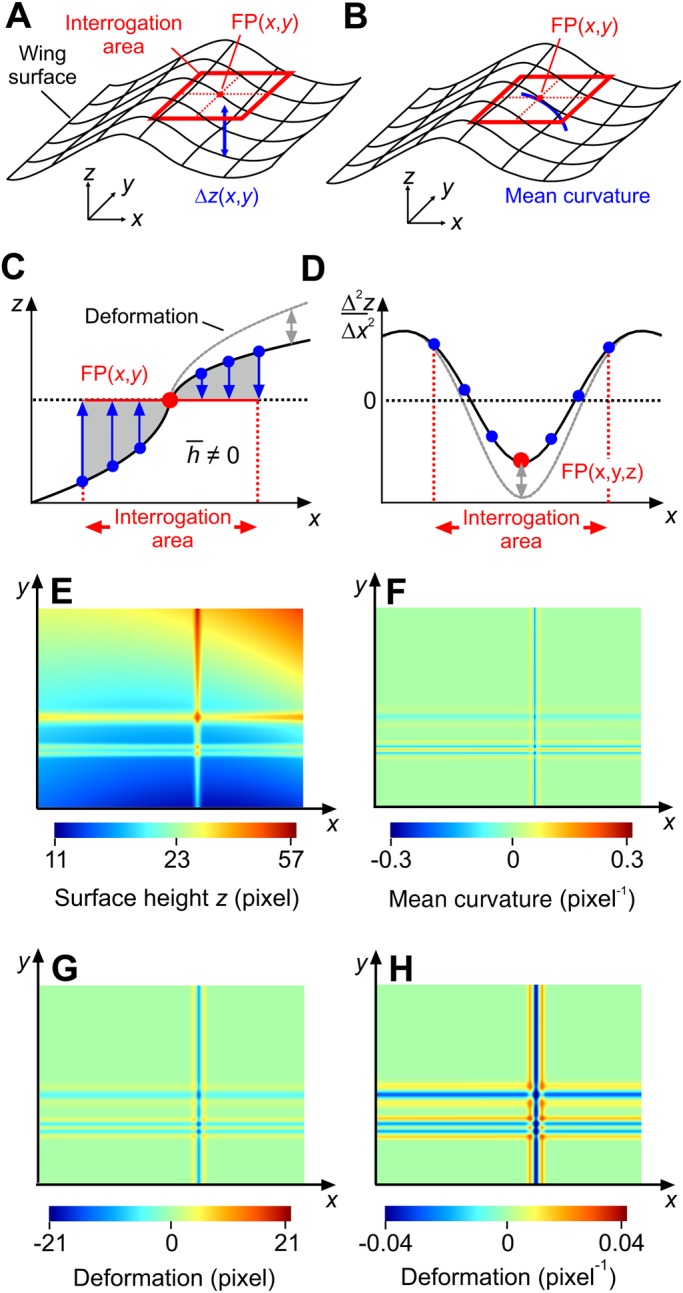
Mechanical properties of insect wings are essential for insect flight aerodynamics. During wing flapping, wings may undergo tremendous deformations, depending on the wings' spatial stiffness distribution. We here show an experimental evaluation of wing stiffness in three species of flies using a micro-force probe and an imaging method for wing surface reconstruction. Vertical deflection in response to point loads at 11 characteristic points on the wing surface reveals that average spring stiffness of bending lines between wing hinge and point loads varies ∼77-fold in small fruit flies and up to ∼28-fold in large blowflies. The latter result suggests that local wing deformation depends to a considerable degree on how inertial and aerodynamic forces are distributed on the wing surface during wing flapping. Stiffness increases with an increasing body mass, amounting to ∼0.6 Nm-1 in fruit flies, ∼0.7 Nm-1 in house flies and ∼2.6 Nm-1 in blowflies for bending lines, running from the wing base to areas near the center of aerodynamic pressure. Wings of house flies have a ∼1.4-fold anisotropy in mean stiffness for ventral versus dorsal loading, while anisotropy is absent in fruit flies and blowflies. We present two numerical methods for calculation of local surface deformation based on surface symmetry and wing curvature. These data demonstrate spatial deformation patterns under load and highlight how veins subdivide wings into functional areas. Our results on wings of living animals differ from previous experiments on detached, desiccated wings and help to construct more realistic mechanical models for testing the aerodynamic consequences of specific wing deformations.
Keywords: Calliphora; Drosophila; Flight; Insect; Musca; Stiffness scaling; Wing mechanics; Wing stiffness.
© 2019. Published by The Company of Biologists Ltd.
Conflict of interest statement
Competing interestsThe authors declare no competing or financial interests.
Figures
References
-
- Bontemps A., Vanneste T., Paquet J.-B., Dietsch T., Grondel S. and Cattan E. (2012). Design and performance of an insect-inspired nano air vehicle. Smart Mat. Struct. 22, 014008 10.1088/0964-1726/22/1/014008 - DOI
-
- Brodsky A. K. (1994). The Evolution of Insect Flight. New York: Oxford University Press.
LinkOut - more resources
Full Text Sources
Molecular Biology Databases