Neuromusculoskeletal model that walks and runs across a speed range with a few motor control parameter changes based on the muscle synergy hypothesis
- PMID: 30674970
- PMCID: PMC6344546
- DOI: 10.1038/s41598-018-37460-3
Neuromusculoskeletal model that walks and runs across a speed range with a few motor control parameter changes based on the muscle synergy hypothesis
Abstract
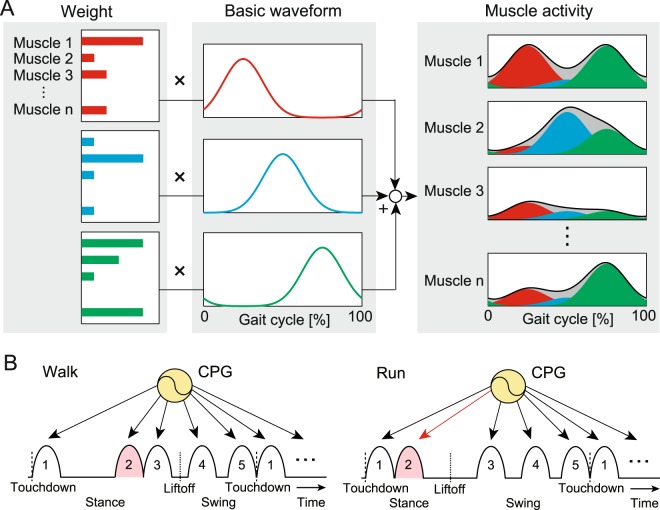
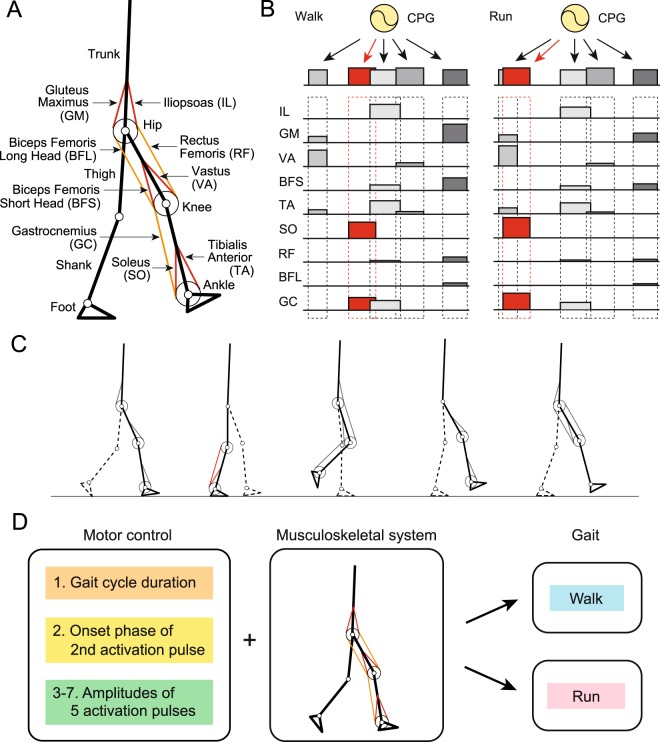
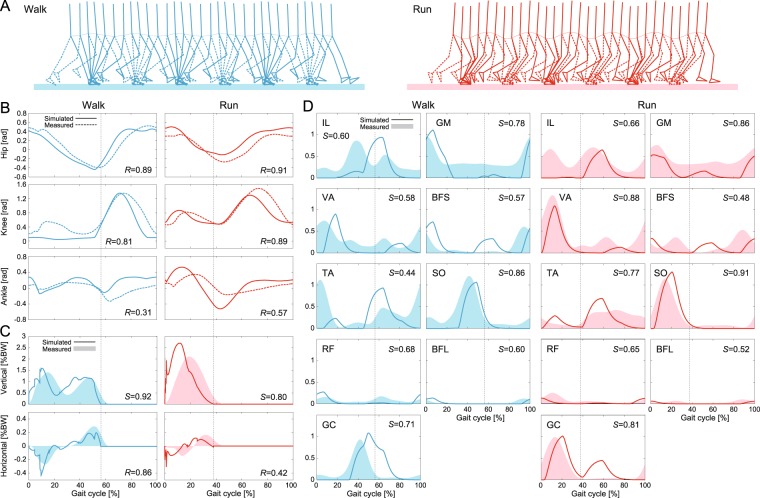
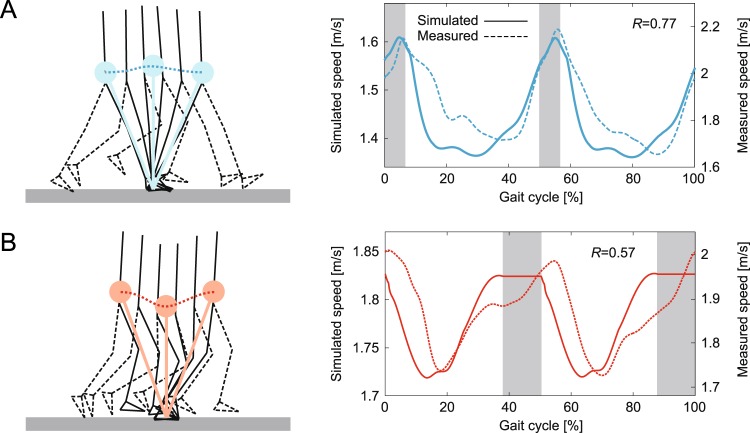
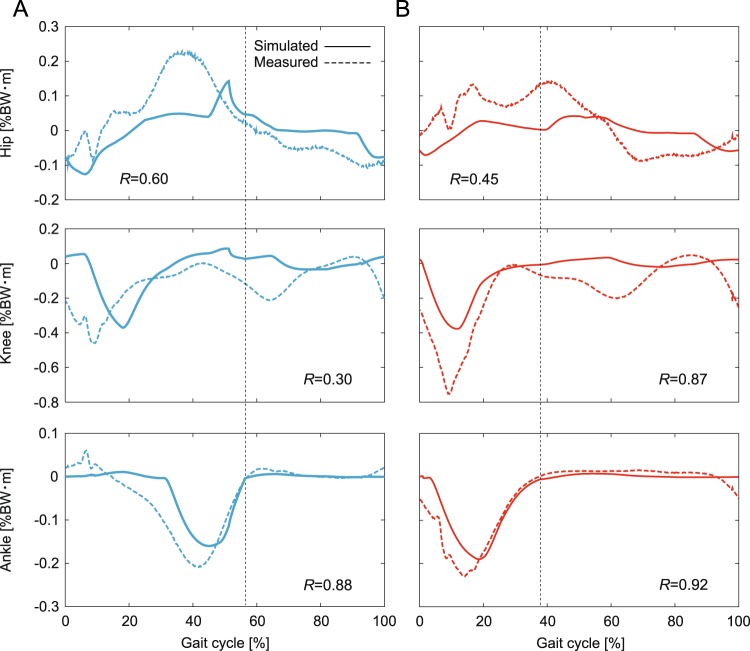
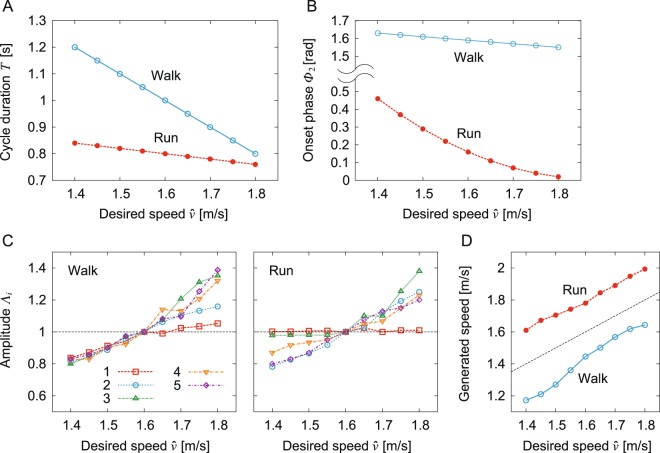
Humans walk and run, as well as change their gait speed, through the control of their complicated and redundant musculoskeletal system. These gaits exhibit different locomotor behaviors, such as a double-stance phase in walking and flight phase in running. The complex and redundant nature of the musculoskeletal system and the wide variation in locomotion characteristics lead us to imagine that the motor control strategies for these gaits, which remain unclear, are extremely complex and differ from one another. It has been previously proposed that muscle activations may be generated by linearly combining a small set of basic pulses produced by central pattern generators (muscle synergy hypothesis). This control scheme is simple and thought to be shared between walking and running at different speeds. Demonstrating that this control scheme can generate walking and running and change the speed is critical, as bipedal locomotion is dynamically challenging. Here, we provide such a demonstration by using a motor control model with 69 parameters developed based on the muscle synergy hypothesis. Specifically, we show that it produces both walking and running of a human musculoskeletal model by changing only seven key motor control parameters. Furthermore, we show that the model can walk and run at different speeds by changing only the same seven parameters based on the desired speed. These findings will improve our understanding of human motor control in locomotion and provide guiding principles for the control design of wearable exoskeletons and prostheses.
Conflict of interest statement
The authors declare no competing interests.
Figures