

Tool Embodiment: The Tool's Output Must Match the User's Input
- PMID: 30687050
- PMCID: PMC6336895
- DOI: 10.3389/fnhum.2018.00537
Tool Embodiment: The Tool's Output Must Match the User's Input
Abstract
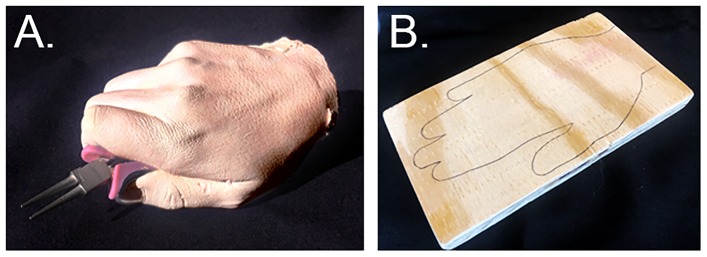
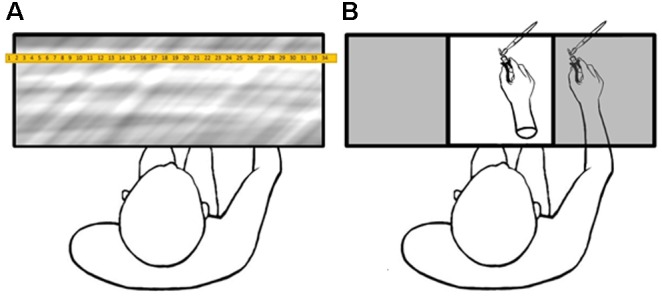
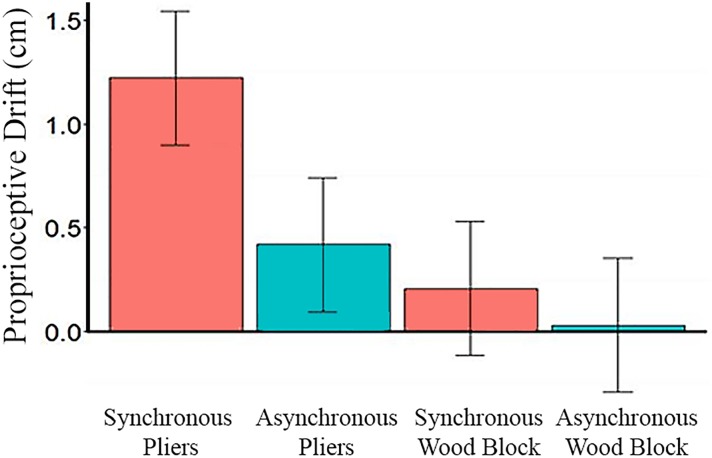
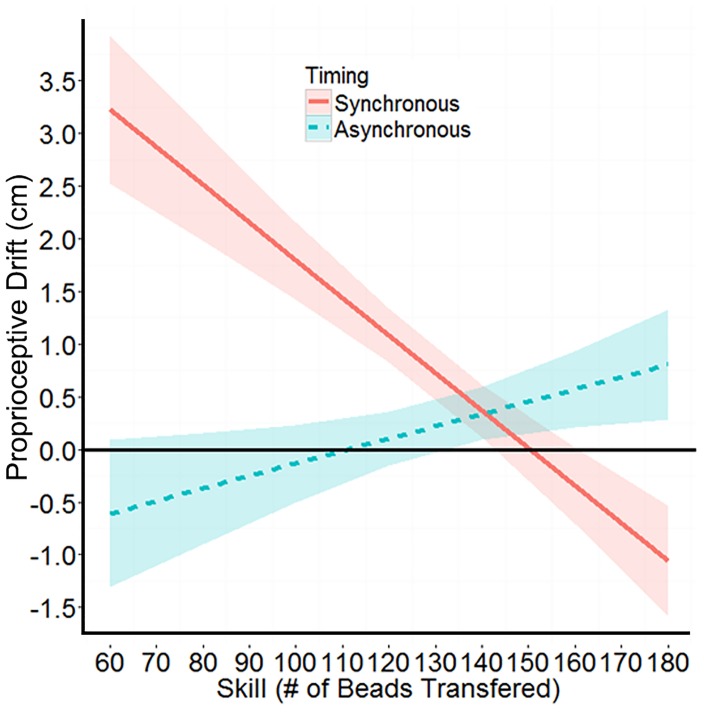
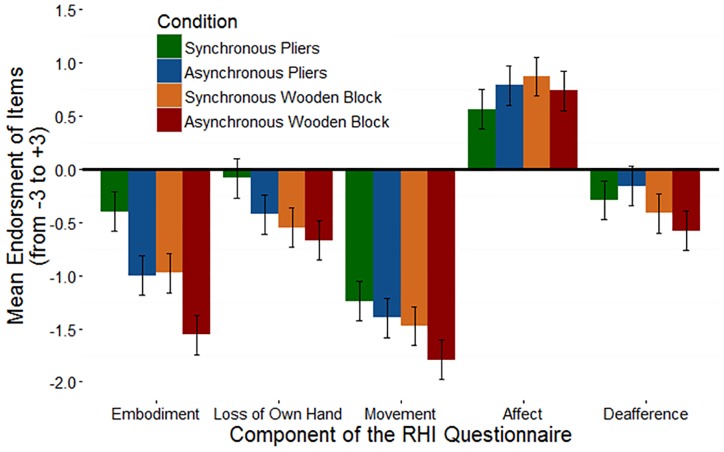
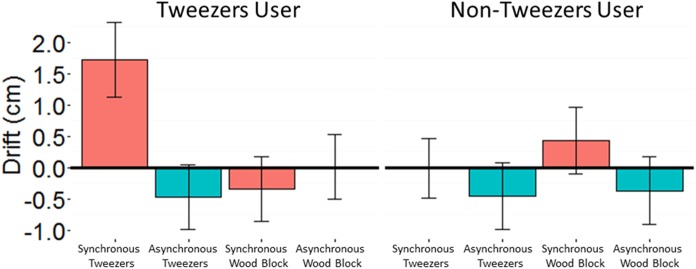
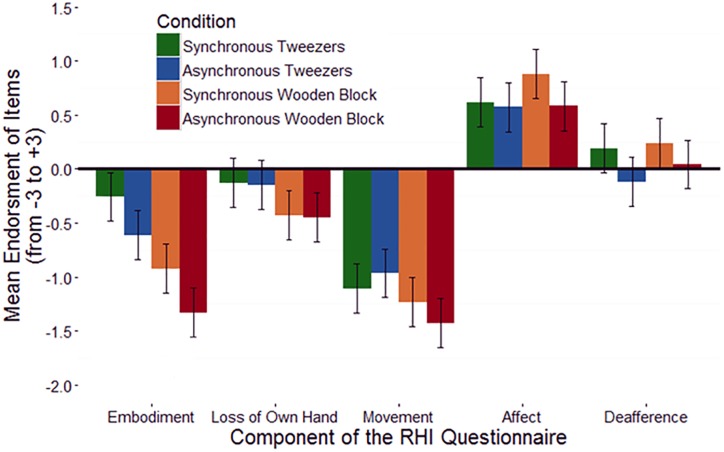
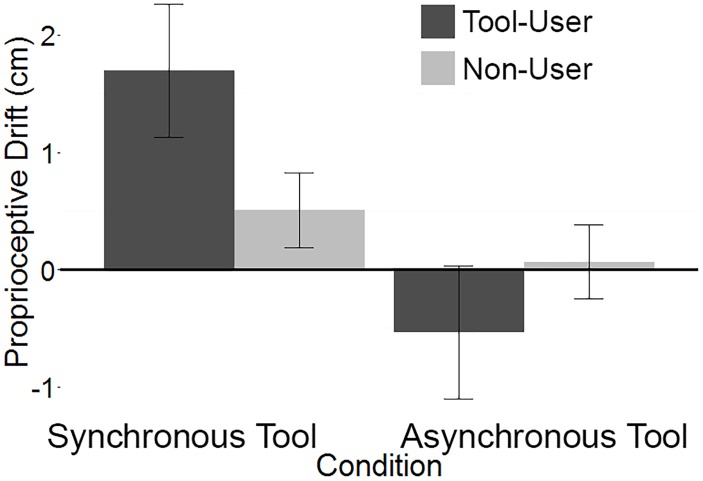
The embodiment of tools and rubber hands is believed to involve the modification of two separate body representations: the body schema and the body image, respectively. It is thought that tools extend the capabilities of the body's action schema, whereas prosthetics like rubber hands are incorporated into the body image itself. Contrary to this dichotomy, recent research demonstrated that chopsticks can be embodied perceptually during a modified version of the rubber hand illusion (RHI) in which tools are held by the rubber hand and by the participant. In the present research, two experiments examined tool morpho-functional (tool output affordance, e.g., precision grasping) and sensorimotor (tool input, e.g., precision grip) match as a mechanism for this tool-use dependent change to the body image. Proprioceptive drift in the RHI occurred when the tool's output and the user's input matched, but not when this match was absent. This suggests that this factor may be necessary for tools to interact with the body image in the RHI.
Keywords: body representation; embodiment; expertise; rubber hand illusion; tools.
Figures

References
-
- Bates D., Maechler M., Bolker B., Walker S. (2014). lme4: linear mixed-effects models using Eigen and S4. R Package Version 11–23.
Associated data
LinkOut - more resources
Full Text Sources