

Validation of Thigh Angle Estimation Using Inertial Measurement Unit Data against Optical Motion Capture Systems
- PMID: 30708957
- PMCID: PMC6387008
- DOI: 10.3390/s19030596
Validation of Thigh Angle Estimation Using Inertial Measurement Unit Data against Optical Motion Capture Systems
Abstract
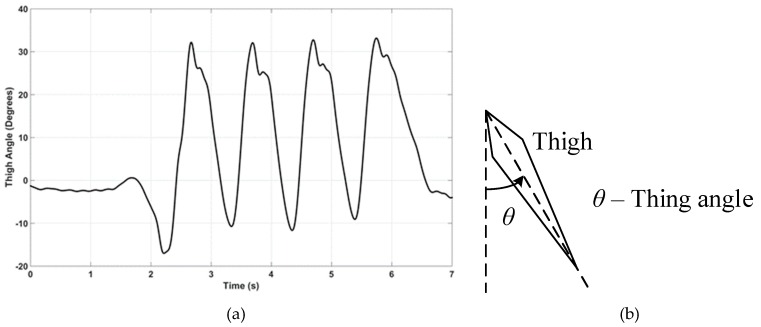
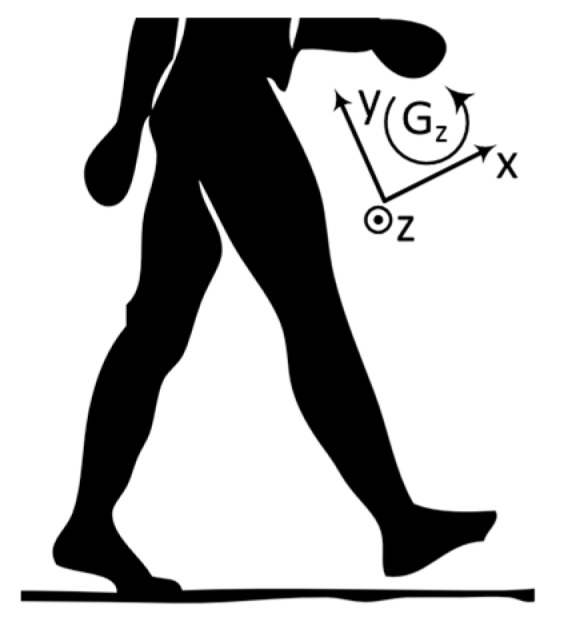
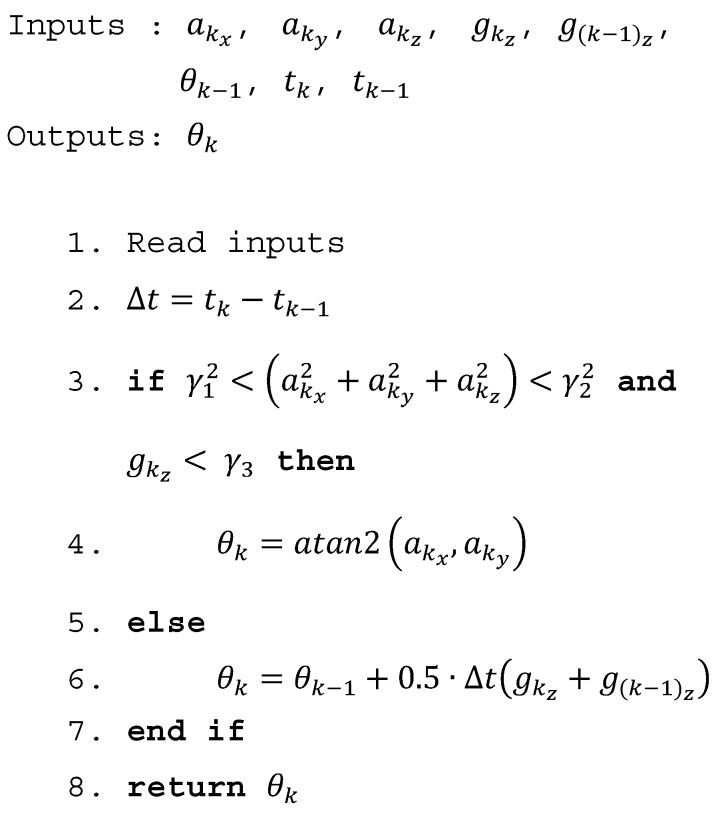
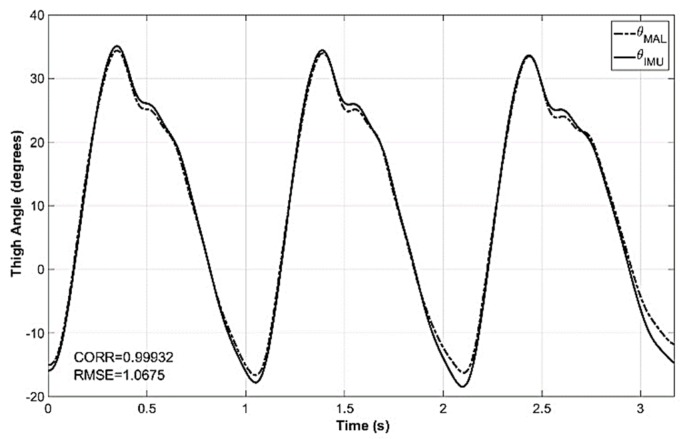
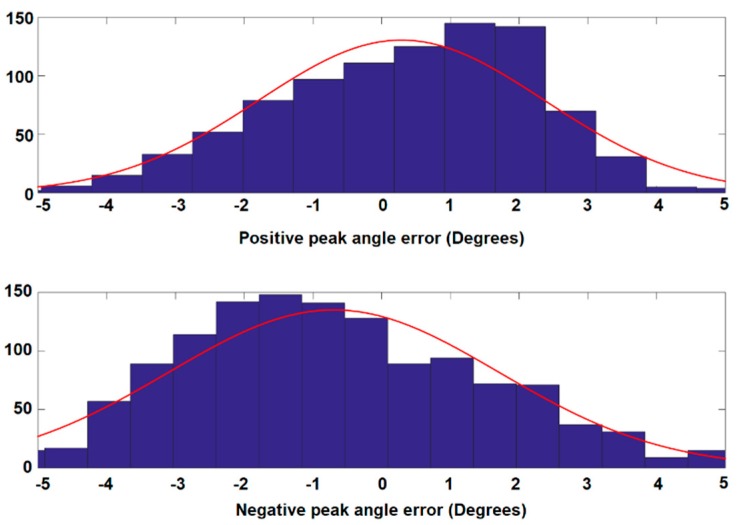
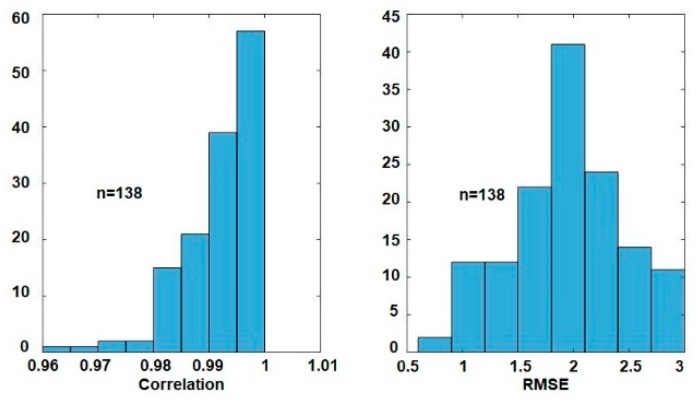
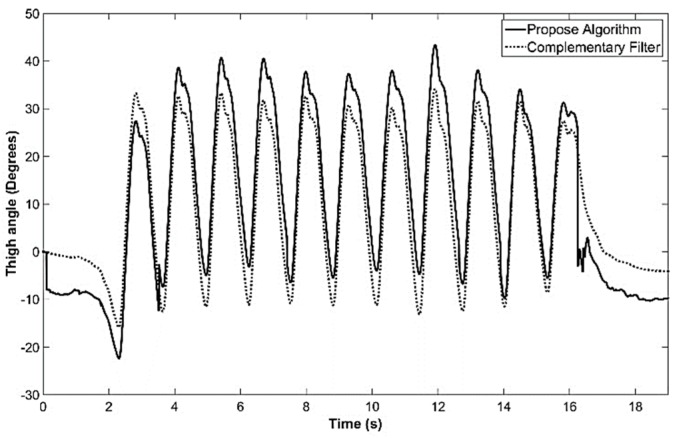
Inertial measurement units are commonly used to estimate the orientation of sections of sections of human body in inertial navigation systems. Most of the algorithms used for orientation estimation are computationally expensive and it is difficult to implement them in real-time embedded systems with restricted capabilities. This paper discusses a computationally inexpensive orientation estimation algorithm (Gyro Integration-Based Orientation Filter-GIOF) that is used to estimate the forward and backward swing angle of the thigh (thigh angle) for a vision impaired navigation aid. The algorithm fuses the accelerometer and gyroscope readings to derive the single dimension orientation in such a way that the orientation is corrected using the accelerometer reading when it reads gravity only or otherwise integrate the gyro reading to estimate the orientation. This strategy was used to reduce the drift caused by the gyro integration. The thigh angle estimated by GIOF was compared against the Vicon Optical Motion Capture System and reported a mean correlation of 99.58% for 374 walking trials with a standard deviation of 0.34%. The Root Mean Square Error (RMSE) of the thigh angle estimated by GIOF compared with Vicon measurement was 1.8477°. The computation time on an 8-bit microcontroller running at 8 MHz for GIOF is about a half of that of Complementary Filter implementation. Although GIOF was only implemented and tested for estimating pitch of the IMU, it can be easily extended into 2D to estimate both pitch and roll.
Keywords: human gait analysis; inertial measurement units; sensor fusion.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Bocksch M., Seitz J., Jahn J. Pedestrian Activity Classification to Improve Human Tracking and Localization; Proceedings of the Forth International Conference on Indoor Positioning and Indoor Navigation IPIN2013; Montbéliard-Belfort, France. 28–31 October 2013; [(accessed on 1 December 2018)]. Available online: http://ipin2013.sciencesconf.org/conference/ipin2013/eda_en.pdf.
-
- Olsson F., Rantakokko J., Nygards J. Cooperative Localization by Foot-Mounted Inertial Navigation Systems and Ultrawideband Ranging; Proceedings of the Fifth International Conference on Indoor Positioning and Indoor Navigation (IPIN2014); Busan, Korea. 27–30 October 2014; [(accessed on 30 July 2015)]. Available online: http://www.ipin2014.org/wp/pdf/2A-4.pdf.
-
- Won S.-H.P., Melek W.W., Golnaraghi F. A Kalman/Particle Filter-Based Position and Orientation Estimation Method Using a Position Sensor/Inertial Measurement Unit Hybrid System. IEEE Trans. Ind. Electron. 2010;57:1787–1798. doi: 10.1109/TIE.2009.2032431. - DOI
-
- YEI Technology “YEI 3-Space Sensor”. [(accessed on 17 July 2014)]; Available online: http://www.yeitechnology.com/yei-3-space-sensor.
LinkOut - more resources
Full Text Sources
