

Modular soft robotic microdevices for dexterous biomanipulation
- PMID: 30714604
- PMCID: PMC6394202
- DOI: 10.1039/c8lc01200h
Modular soft robotic microdevices for dexterous biomanipulation
Abstract
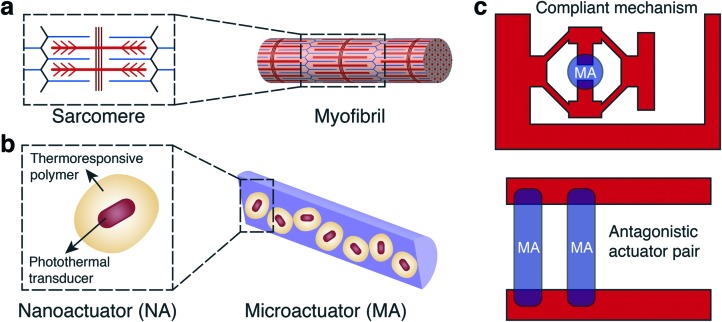
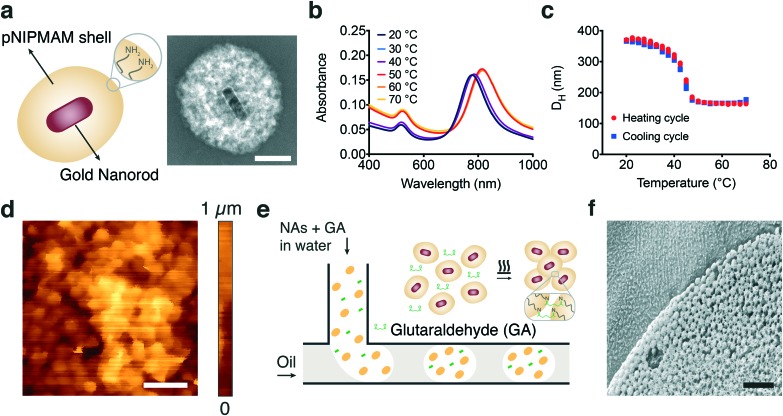
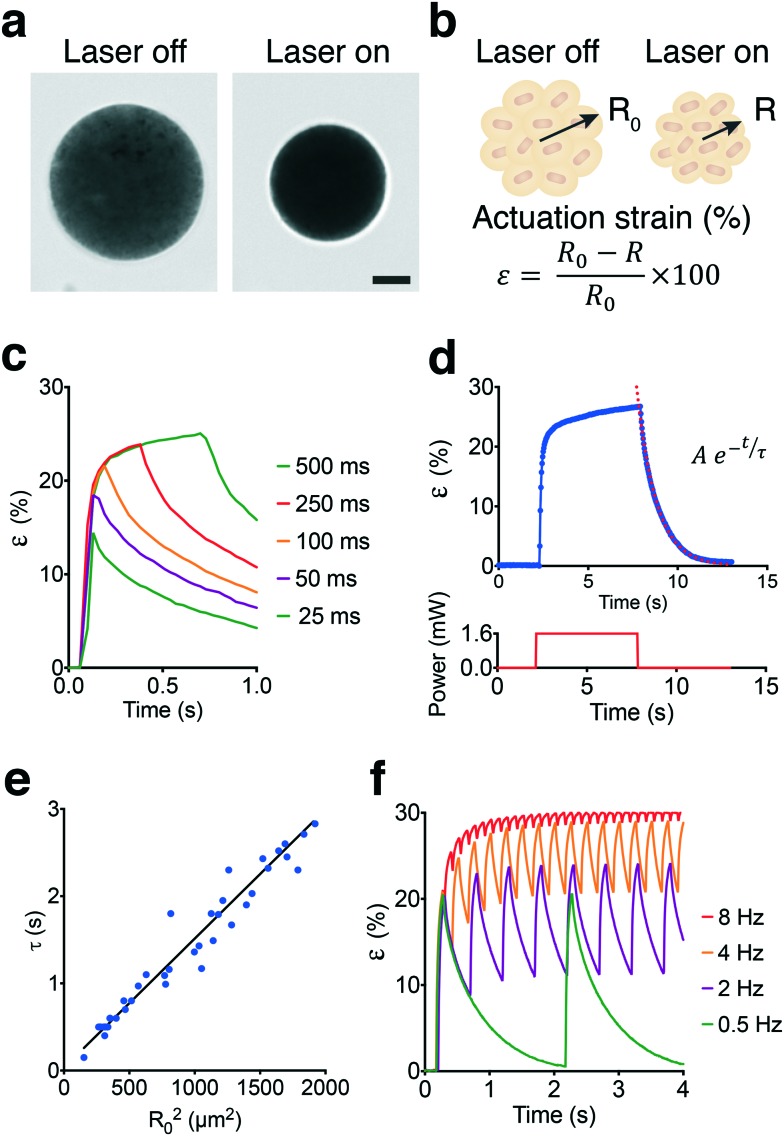
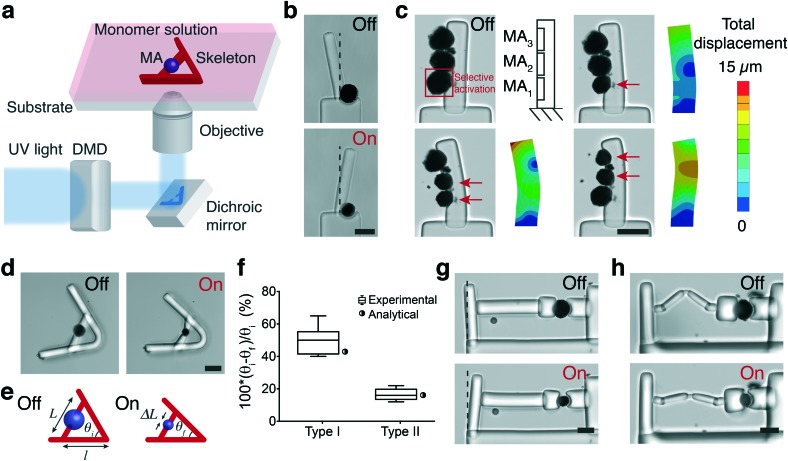
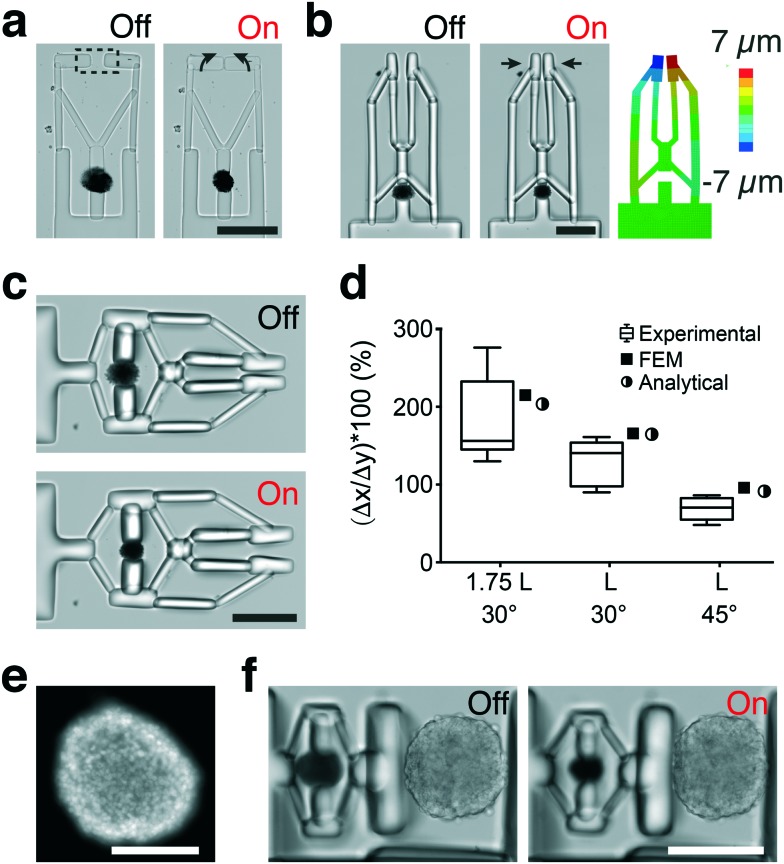
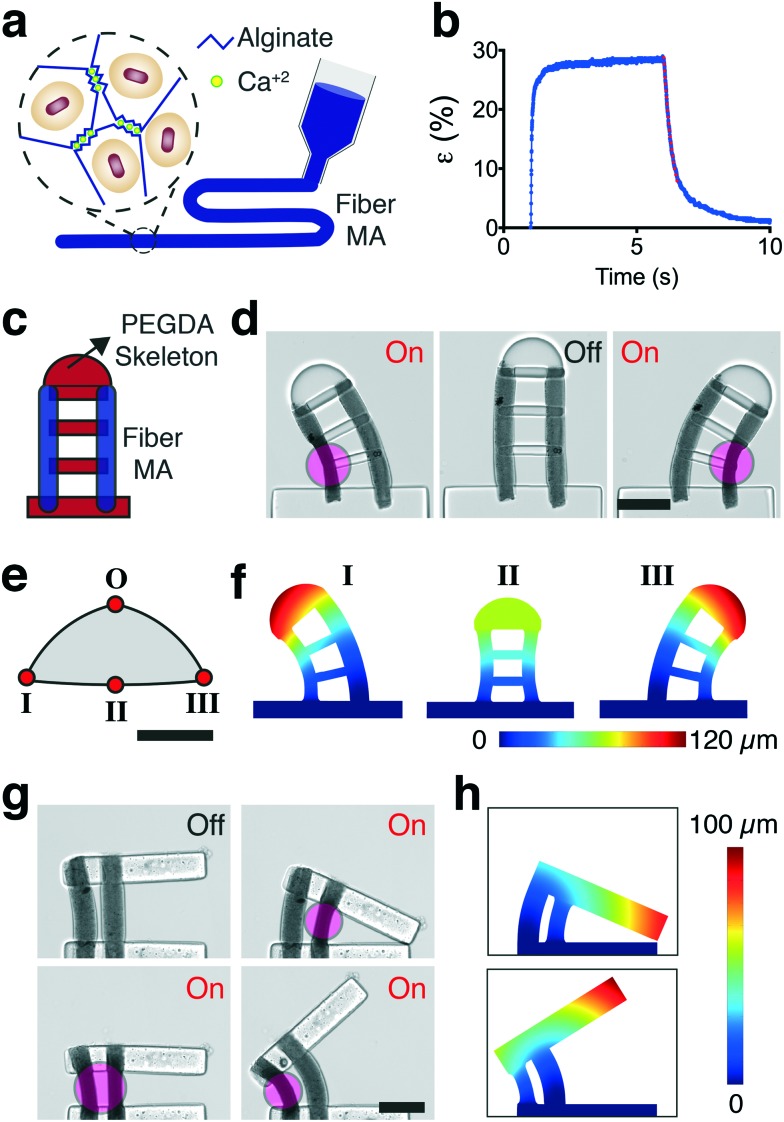
We present a methodology for building biologically inspired, soft microelectromechanical systems (MEMS) devices. Our strategy combines several advanced techniques including programmable colloidal self-assembly, light-harvesting with plasmonic nanotransducers, and in situ polymerization of compliant hydrogel mechanisms. We synthesize optomechanical microactuators using a template-assisted microfluidic approach in which gold nanorods coated with thermoresponsive poly(N-isopropylmethacrylamide) (pNIPMAM) polymer function as nanoscale building blocks. The resulting microactuators exhibit mechanical properties (4.8 ± 2.1 kPa stiffness) and performance metrics (relative stroke up to 0.3 and stress up to 10 kPa) that are comparable to that of bioengineered muscular constructs. Near-infrared (NIR) laser illumination provides effective spatiotemporal control over actuation (sub-micron spatial resolution at millisecond temporal resolution). Spatially modulated hydrogel photolithography guided by an experimentally validated finite element-based design methodology allows construction of compliant poly(ethylene glycol) diacrylate (PEGDA) mechanisms around the microactuators. We demonstrate the versatility of our approach by manufacturing a diverse array of microdevices including lever arms, continuum microrobots, and dexterous microgrippers. We present a microscale compression device that is developed for mechanical testing of three-dimensional biological samples such as spheroids under physiological conditions.
Figures
References
-
- Hu C., Pané S., Nelson B. J. Annu. Rev. Control Robot Auton. Syst. 2018;1:53–75.
-
- Nocentini S., Parmeggiani C., Martella D., Wiersma D. S. Adv. Opt. Mater. 2018:1800207.
-
- Palagi S., Fischer P. Nat. Rev. Mater. 2018:1.
-
- Stuart M. A. C., Huck W. T., Genzer J., Müller M., Ober C., Stamm M., Sukhorukov G. B., Szleifer I., Tsukruk V. V., Urban M. Nat. Mater. 2010;9:101. - PubMed
Publication types
MeSH terms
Substances
LinkOut - more resources
Full Text Sources
Miscellaneous