

Ergonomics in handheld and robot-assisted camera control: a randomized controlled trial
- PMID: 30746574
- PMCID: PMC6831540
- DOI: 10.1007/s00464-019-06678-1
Ergonomics in handheld and robot-assisted camera control: a randomized controlled trial
Abstract
Background: Laparoscopic surgery potentially increases the physical burden to operating theater personnel and can cause physical discomfort. This study aims to evaluate if a robotic camera holder (AutoLap™ system) can improve ergonomics for the surgeon and the camera assistant during laparoscopic procedures.
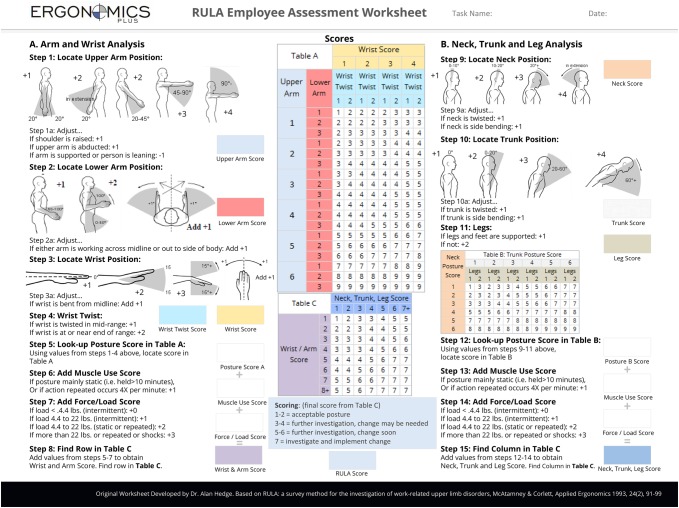
Methods: A total of thirty cases were included and randomized (15 AutoLap™, 15 control). Five types of surgery were included: right hemicolectomy, fundoplication, sigmoid resection, rectopexy, and low anterior resection. The posture of the surgeon and assistant was photographed during predefined steps of the procedure. MATLAB was used to calculate angles relevant for the RULA score. The RULA score is a validated method to evaluate body posture, force and repetition of the upper extremities. Two investigators assessed the RULA score independently. Three subjective questionnaires (SMEQ, NASA TLX, and LED) were used to assess mental and physical discomfort.
Results: No differences in patient characteristics were observed. Sixteen fundoplications, seven right hemicolectomies, five sigmoid resections, one rectopexy, and one low anterior resection were included. The mean RULA score of the surgeon was comparable in both groups, 2.58 (AutoLap™) versus 2.72 (control). The mean RULA score of the assistant was significantly different in both groups, with 2.55 (AutoLap™) versus 3.70 (control) (p = 0.001). The inter-observer variability (ICC) was excellent with 0.93 (surgeon) and 0.97 (assistant). The questionnaires showed a significant difference in physical discomfort for the assistant. The LED and SMEQ score were significantly lower in the robotic group. The NASA TLX demonstrated a significant reduction in scores in all domains when using robotics with the exception of the mental domain.
Conclusion: Use of the AutoLap™ system shows improvement in ergonomics and posture of the first assistant, and ergonomics of the surgeon are not affected. Furthermore, the subjective work load is significantly reduced by using a robotic camera holder.
Trial registration number: NCT0339960, https://clinicaltrials.gov/ct2/show/study/NCT03339960?term=autolap&rank=5 .
Keywords: Active robotic camera steering; AutoLap™ system; Ergonomics; Laparoscopic camera holder.
Conflict of interest statement
Paul Wijsman is a Clinical Field Engineer of Medical Surgery Technologies ltd (M.S.T) from 2016 to 2018. Ivo Broeders is a paid member of the Clinical Advisory Board of M.S.T. Lennert Molenaar, Cas van ‘t Hullenaar, Bas van Vugt, Wim Bleeker, and Werner Draaisma have no conflicts of interest or financial ties to disclose.
Figures

References
Publication types
MeSH terms
Associated data
LinkOut - more resources
Full Text Sources
Medical
