

Robot-assisted Percutaneous Transfacet Screw Fixation Supplementing Oblique Lateral Interbody Fusion Procedure: Accuracy and Safety Evaluation of This Novel Minimally Invasive Technique
- PMID: 30776856
- PMCID: PMC6430475
- DOI: 10.1111/os.12428
Robot-assisted Percutaneous Transfacet Screw Fixation Supplementing Oblique Lateral Interbody Fusion Procedure: Accuracy and Safety Evaluation of This Novel Minimally Invasive Technique
Abstract
Objectives: Percutaneous transfacet screw fixation (pTSF) is a minimally invasive posterior fixation technique supplementing oblique lateral interbody fusion (OLIF) for lumbar spinal disorders. Accurate screw insertion is difficult to achieve and technically demanding under 2-D fluoroscopy. Recently developed robot-assisted spinal surgery demonstrated a high level of accuracy of pedicle screw insertion and a low complication rate. No published study has reported this combination technique. The aim of our study was to evaluate the accuracy and safety properties of the combination of both minimally invasive techniques: robot-assisted pTSF supplementing the OLIF procedure.
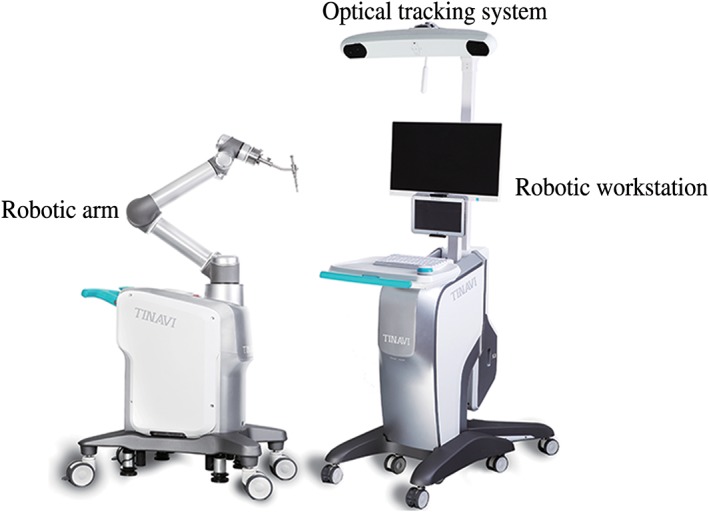
Methods: This was an experimental and prospective study. Selected consecutive patients with lumbar degenerative disorders received robot-assisted pTSF supplementing the OLIF procedure using the TianJi Robot system operated by one senior surgeon from March to October 2018. The accuracy of screw insertion and perioperative screw-related complications were evaluated. Assessment of the accuracy of screw insertion included intraoperative robotic guidance accuracy and incidence of screw encroachments. Intraoperative robotic guidance accuracy referred to translational and angular deviations of screws, which were assessed by comparing the planned and actual screw trajectories guided by the robot on reconstructed images using TianJi Robot Planning Software. Screw encroachments were evaluated on postoperative CT images and classified by a grading system (A, excellent; B, good; C, poor). Screw-related complications including intraoperative pin skidding, screw malposition and adjustment, together with postoperative neurological symptoms that correlated with screw malposition were recorded.
Results: Ten patients, with an average age of 60.2 years, were selected and recruited in this study. All cases were degenerative lumbar spinal disorders, out of which there were 6 cases of Meyerding Grade I degenerative spondylolisthesis. Twenty-four transfacet screws were inserted by robotic assistance. Instrumented levels included nine segments at L4-5 level and three segments at L3-4 level. Two patients had both L4-5 and L3-4 level fixation. The average surgical time was 3.3 h (SD, 0.8 h). The mean blood loss was 90 mL (SD, 32 mL). Intraoperative guidance accuracy showed 1.09 ± 0.17 mm (ranging from 0.75 to 1.22 mm) translational deviation and 2.17° ± 0.39° (ranging from 1.47° to 2.54°) angular deviation. The gradings of screw encroachment were: 17 screws (71%) with Grade A, 6 screws (25%) with Grade B, and 1 screw (4%) with Grade C. Only one pin skidding occurred intraoperatively and revised subsequently. No postoperative neurological complications were found.
Conclusion: Our preliminary study of robot-assisted pTSF supplementing the OLIF procedure showed a high level of accuracy for screw insertion and this minimally invasive combination technique was found to be a feasible and safe procedure.
Keywords: Accuracy; Lumbar disorders; Oblique lateral interbody fusion; Robot; Transfacet screw.
© 2019 The Authors. Orthopaedic Surgery published by Chinese Orthopaedic Association and John Wiley & Sons Australia, Ltd.
Figures





Similar articles
-
Clinical Effects of Oblique Lateral Interbody Fusion by Conventional Open versus Percutaneous Robot-Assisted Minimally Invasive Pedicle Screw Placement in Elderly Patients.Orthop Surg. 2020 Feb;12(1):86-93. doi: 10.1111/os.12587. Epub 2019 Dec 27. Orthop Surg. 2020. PMID: 31880084 Free PMC article.
-
Revisions for screw malposition and clinical outcomes after robot-guided lumbar fusion for spondylolisthesis.Neurosurg Focus. 2017 May;42(5):E12. doi: 10.3171/2017.3.FOCUS16534. Neurosurg Focus. 2017. PMID: 28463610
-
Accuracy of Robot-Assisted Percutaneous Pedicle Screw Placement for Treatment of Lumbar Spondylolisthesis: A Comparative Cohort Study.Med Sci Monit. 2019 Apr 4;25:2479-2487. doi: 10.12659/MSM.913124. Med Sci Monit. 2019. PMID: 30946733 Free PMC article.
-
Evolution of Minimally Invasive Lumbar Spine Surgery.World Neurosurg. 2020 Aug;140:622-626. doi: 10.1016/j.wneu.2020.05.071. Epub 2020 May 17. World Neurosurg. 2020. PMID: 32434014 Review.
-
Comparison of robot-assisted versus fluoroscopy-guided transforaminal lumbar interbody fusion (TLIF) for lumbar degenerative diseases: a systematic review and meta-analysis of randomized controlled trails and cohort studies.Syst Rev. 2024 Jul 5;13(1):170. doi: 10.1186/s13643-024-02600-6. Syst Rev. 2024. PMID: 38970142 Free PMC article.
Cited by
-
The Influence of Screw Positioning on Cage Subsidence in Patients with Oblique Lumbar Interbody Fusion Combined with Anterolateral Fixation.Orthop Surg. 2023 Dec;15(12):3263-3271. doi: 10.1111/os.13882. Epub 2023 Sep 28. Orthop Surg. 2023. PMID: 37771126 Free PMC article.
-
Three-Dimensional Quantitative Assessment of Pedicle Screw Accuracy in Clinical Utilization of a New Robotic System in Spine Surgery: A Multicenter Study.Neurospine. 2023 Sep;20(3):1028-1039. doi: 10.14245/ns.2346552.276. Epub 2023 Sep 30. Neurospine. 2023. PMID: 37798995 Free PMC article.
-
Comparison of transfacet and pedicle screws in oblique lateral interbody fusion for single-level degenerative lumbar spine diseases: a retrospective propensity score-matched analysis.BMC Surg. 2022 Dec 15;22(1):429. doi: 10.1186/s12893-022-01880-w. BMC Surg. 2022. PMID: 36522754 Free PMC article.
-
Evaluation of a Three-Dimensional Printed Guide and a Polyoxymethylene Thermoplastic Regulator for Percutaneous Pedicle Screw Fixation in Patients with Thoracolumbar Fracture.Med Sci Monit. 2020 Jan 14;26:e920578. doi: 10.12659/MSM.920578. Med Sci Monit. 2020. PMID: 31932574 Free PMC article. Clinical Trial.
-
Transfacet screws using spinal navigation in addition to anterior or oblique lumbar interbody fusion: technical note and preliminary results.Eur J Orthop Surg Traumatol. 2021 Oct;31(7):1523-1528. doi: 10.1007/s00590-021-02878-5. Epub 2021 Feb 1. Eur J Orthop Surg Traumatol. 2021. PMID: 33523313
References
-
- Li JX, Phan K, Mobbs R. Oblique lumbar interbody fusion: technical aspects, operative outcomes, and complications. World Neurosurg, 2017, 98: 113–123. - PubMed
-
- Fujibayashi S, Hynes RA, Otsuki B, Kimura H, Takemoto M, Matsuda S. Effect of indirect neural decompression through oblique lateral interbody fusion for degenerative lumbar disease. Spine (Phila Pa 1976), 2015, 40: E175–E182. - PubMed
-
- Sato J, Ohtori S, Orita S, et al Radiographic evaluation of indirect decompression of mini‐open anterior retroperitoneal lumbar interbody fusion: oblique lateral interbody fusion for degenerated lumbar spondylolisthesis. Eur Spine J, 2017, 26: 671–678. - PubMed
-
- Isaacs RE, Sembrano JN, Tohmeh AG. Two‐year comparative outcomes of MIS lateral and MIS transforaminal interbody fusion in the treatment of degenerative spondylolisthesis: Part II: radiographic findings. Spine (Phila Pa 1976), 2016, 41 (Suppl. 8): S133–S144. - PubMed
-
- Lonstein JE, Denis F, Perra JH, Pinto MR, Smith MD, Winter RB. Complications associated with pedicle screws. J Bone Joint Surg Am, 1999, 81: 1519–1528. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
