

A Hardware-Friendly Optical Flow-Based Time-to-Collision Estimation Algorithm
- PMID: 30781489
- PMCID: PMC6412735
- DOI: 10.3390/s19040807
A Hardware-Friendly Optical Flow-Based Time-to-Collision Estimation Algorithm
Abstract
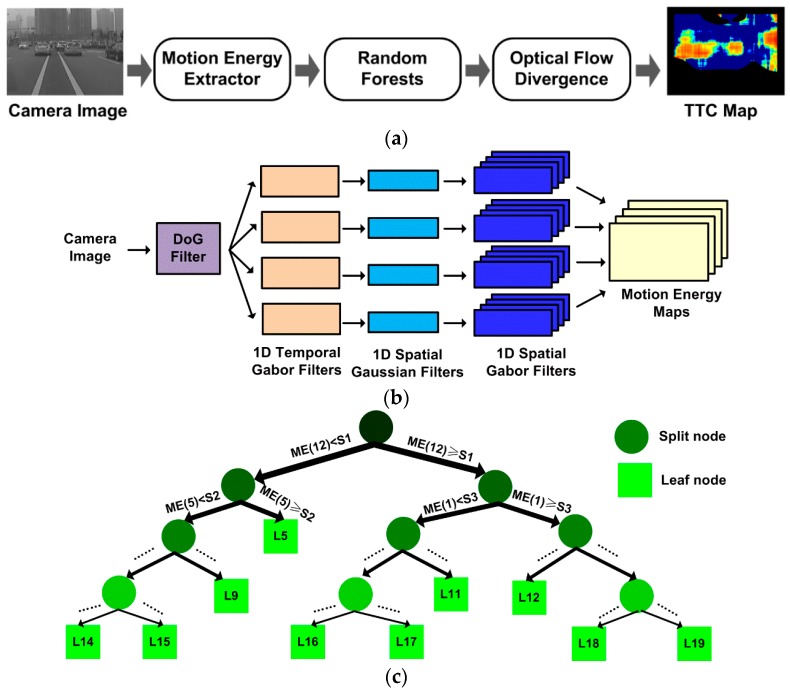
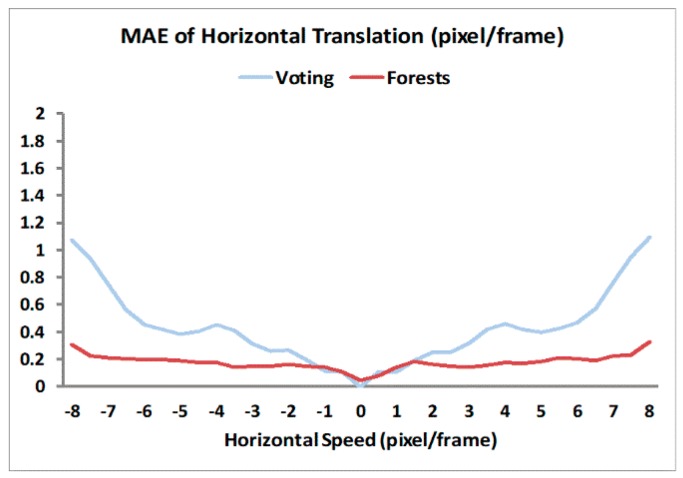
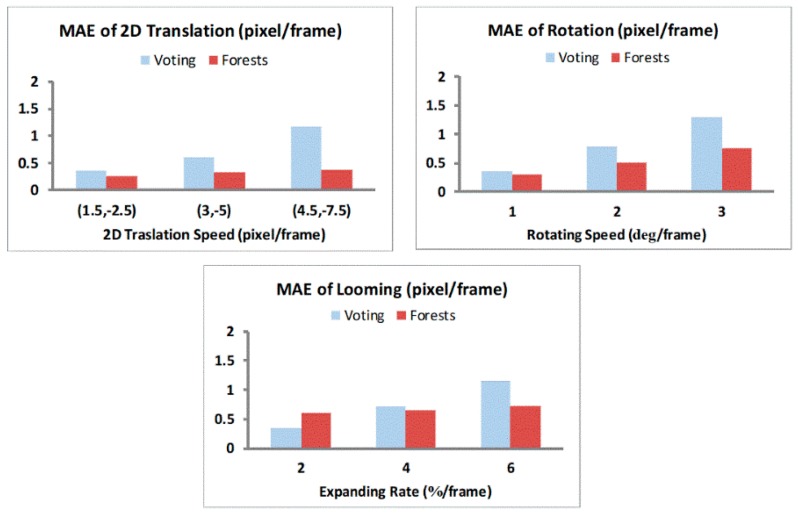
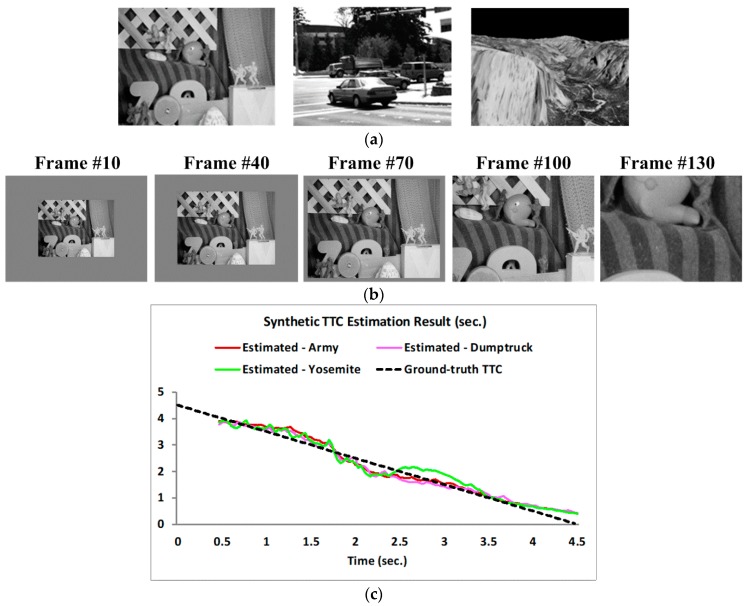
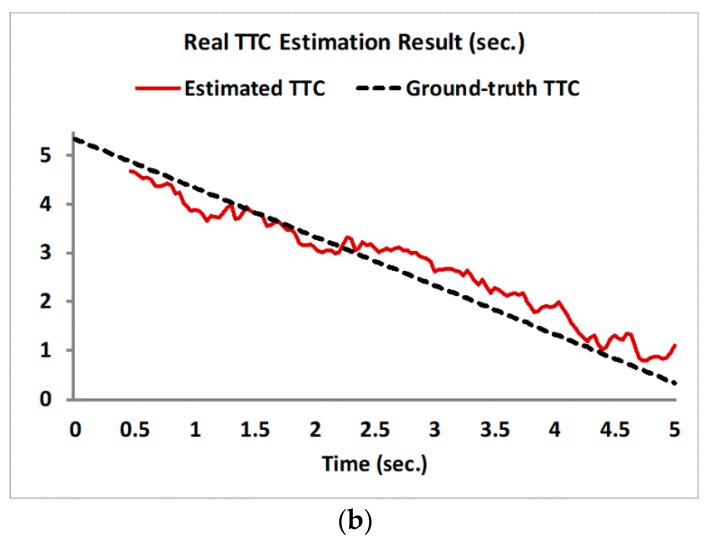
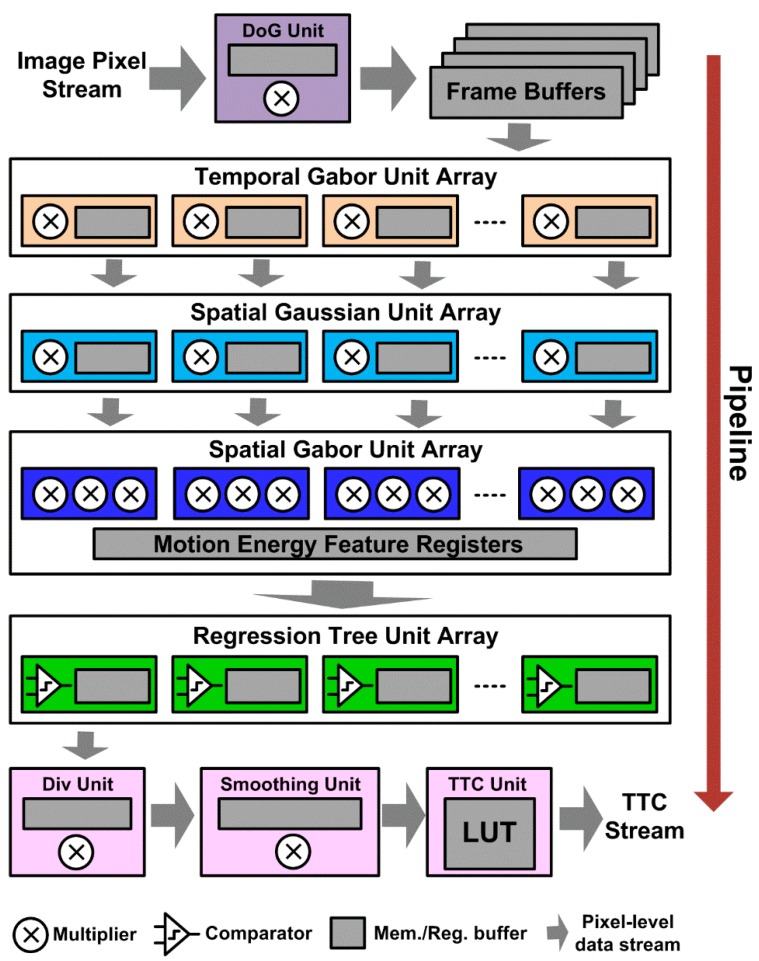
This work proposes a hardware-friendly, dense optical flow-based Time-to-Collision (TTC) estimation algorithm intended to be deployed on smart video sensors for collision avoidance. The algorithm optimized for hardware first extracts biological visual motion features (motion energies), and then utilizes a Random Forests regressor to predict robust and dense optical flow. Finally, TTC is reliably estimated from the divergence of the optical flow field. This algorithm involves only feed-forward data flows with simple pixel-level operations, and hence has inherent parallelism for hardware acceleration. The algorithm offers good scalability, allowing for flexible tradeoffs among estimation accuracy, processing speed and hardware resource. Experimental evaluation shows that the accuracy of the optical flow estimation is improved due to the use of Random Forests compared to existing voting-based approaches. Furthermore, results show that estimated TTC values by the algorithm closely follow the ground truth. The specifics of the hardware design to implement the algorithm on a real-time embedded system are laid out.
Keywords: biological visual features; motion energy; motion estimation; optical flow; spatiotemporal energy; time-to-collision.
Conflict of interest statement
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Figures

Similar articles
-
A Compact VLSI System for Bio-Inspired Visual Motion Estimation.IEEE Trans Circuits Syst Video Technol. 2018 Apr;28(4):1021-1036. doi: 10.1109/TCSVT.2016.2630848. Epub 2016 Nov 18. IEEE Trans Circuits Syst Video Technol. 2018. PMID: 29686476 Free PMC article.
-
Depth from a Motion Algorithm and a Hardware Architecture for Smart Cameras.Sensors (Basel). 2018 Dec 23;19(1):53. doi: 10.3390/s19010053. Sensors (Basel). 2018. PMID: 30583606 Free PMC article.
-
Uncertainty Estimation of Dense Optical Flow for Robust Visual Navigation.Sensors (Basel). 2021 Nov 16;21(22):7603. doi: 10.3390/s21227603. Sensors (Basel). 2021. PMID: 34833677 Free PMC article.
-
Time-to-Collision estimation from motion based on primate visual processing.IEEE Trans Pattern Anal Mach Intell. 2005 Aug;27(8):1279-91. doi: 10.1109/TPAMI.2005.168. IEEE Trans Pattern Anal Mach Intell. 2005. PMID: 16119266
-
Robust optical flow estimation based on a sparse motion trajectory set.IEEE Trans Image Process. 2003;12(4):431-45. doi: 10.1109/TIP.2003.811628. IEEE Trans Image Process. 2003. PMID: 18237921
Cited by
-
Optical Flow-Based Obstacle Detection for Mid-Air Collision Avoidance.Sensors (Basel). 2024 May 9;24(10):3016. doi: 10.3390/s24103016. Sensors (Basel). 2024. PMID: 38793871 Free PMC article.
References
-
- Sanchez-Garcia A.J., Rios-Figueroa H.V., Marin-Hernandez A., Contreras-Vega G. Decision making for obstacle avoidance in autonomous mobile robots by time to contact and optical flow; Proceedings of the Decision Making for Obstacle Avoidance in Autonomous Mobile Robots by Time to Contact and Optical Flow; Cholula, Mexico. 25–27 February 2015; pp. 130–134.
-
- Pundlik S., Tomasi M., Luo G. Collision detection for visually impaired from a body-mounted camera; Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops; Portland, OR, USA. 23–28 June 2013; pp. 41–47.
-
- Alenyà G., Nègre A., Crowley J.L. Time to contact for obstacle avoidance; Proceedings of the 4th European Conference on Mobile Robots; Mlini/Dubrovnik, Croatia. 23–25 September 2009; pp. 19–24.
Grants and funding
LinkOut - more resources
Full Text Sources
