

Limb phase flexibility in walking: a test case in the squirrel monkey (Saimiri sciureus)
- PMID: 30820237
- PMCID: PMC6380004
- DOI: 10.1186/s12983-019-0299-8
Limb phase flexibility in walking: a test case in the squirrel monkey (Saimiri sciureus)
Abstract
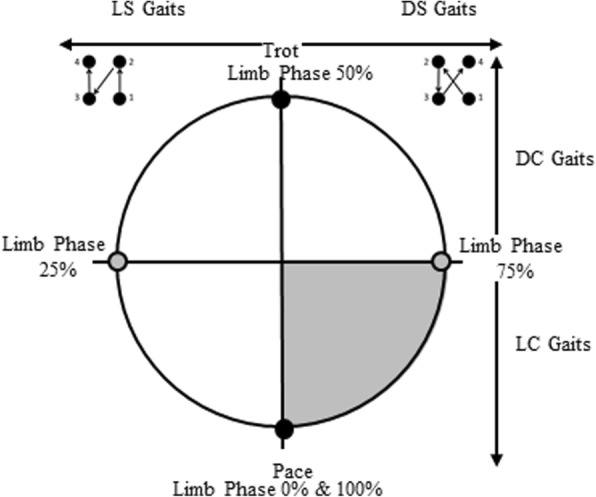
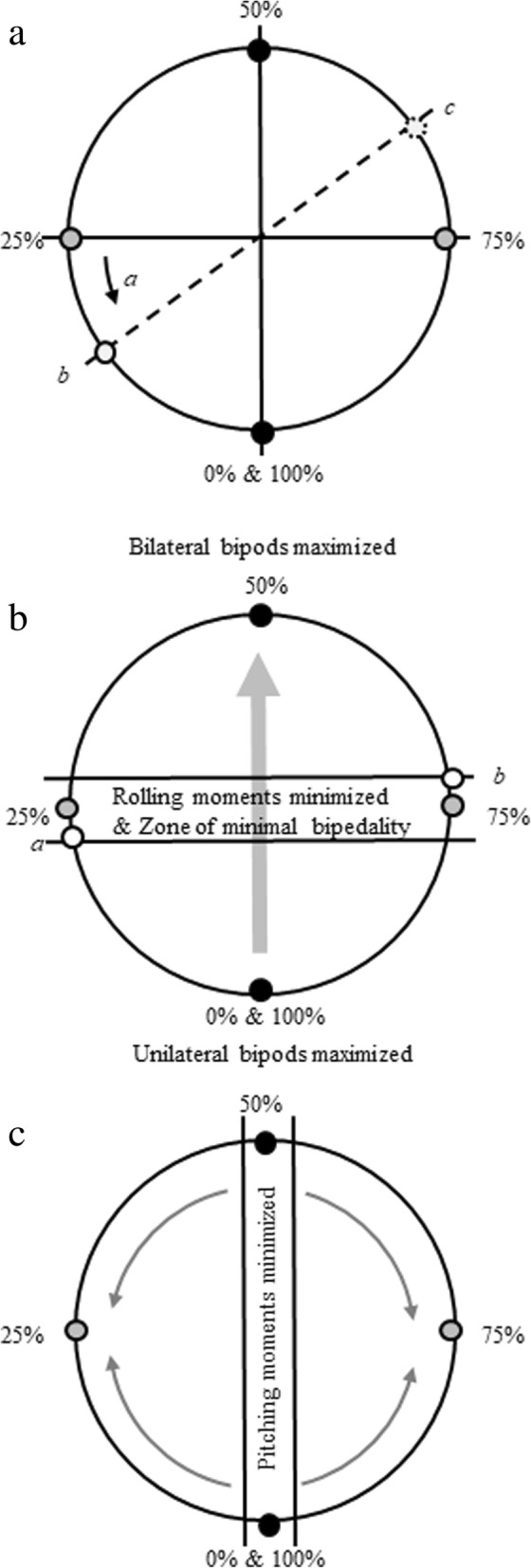
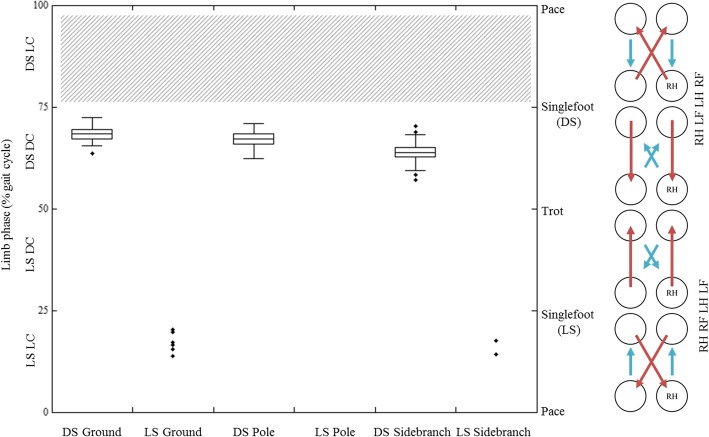
Background: Previous analyses of factors influencing footfall timings and gait selection in quadrupeds have focused on the implications for energetic cost or gait mechanics separately. Here we present a model for symmetrical walking gaits in quadrupedal mammals that combines both factors, and aims to predict the substrate contexts in which animals will select certain ranges of footfall timings that (1) minimize energetic cost, (2) minimize rolling and pitching moments, or (3) balance the two. We hypothesize that energy recovery will be a priority on all surfaces, and will be the dominant factor determining footfall timings on flat, ground-like surfaces. The ability to resist pitch and roll, however, will play a larger role in determining footfall choice on narrower and more complex branch-like substrates. As a preliminary test of the expectations of the model, we collected sample data on footfall timings in a primate with relatively high flexibility in footfall timings - the squirrel monkey (Saimiri sciureus) - walking on a flat surface, straight pole, and a pole with laterally-projecting branches to simulate simplified ground and branch substrates. We compare limb phase values on these supports to the expectations of the model.
Results: As predicted, walking steps on the flat surface tended towards limb phase values that promote energy exchange. Both pole substrates induced limb phase values predicted to favor reduced pitching and rolling moments.
Conclusions: These data provide novel insight into the ways in which animals may choose to adjust their behavior in response to movement on flat versus complex substrates and the competing selective factors that influence footfall timing in mammals. These data further suggest a pathway for future investigations using this perspective.
Keywords: Arboreality; Biomechanics; Duty factor; Gait; Locomotion; Primates; Speed.
Conflict of interest statement
All data collection methods were approved and monitored by the Duke University Institutional Animal Care and Use Committee, protocol # A319–10-12.Not applicable.The authors declare that they have no competing interests.Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Figures

Similar articles
-
The effects of natural substrate discontinuities on the quadrupedal gait kinematics of free-ranging Saimiri sciureus.Am J Primatol. 2019 Sep;81(9):e23055. doi: 10.1002/ajp.23055. Epub 2019 Oct 2. Am J Primatol. 2019. PMID: 31578748
-
Gait selection and the ontogeny of quadrupedal walking in squirrel monkeys (Saimiri boliviensis).Am J Phys Anthropol. 2012 Apr;147(4):580-92. doi: 10.1002/ajpa.22016. Epub 2012 Feb 10. Am J Phys Anthropol. 2012. PMID: 22328448
-
The quadrupedal walking gait of the olive baboon, Papio anubis: an exploratory study integrating kinematics and EMG.J Exp Biol. 2021 Jul 15;224(14):jeb242587. doi: 10.1242/jeb.242587. Epub 2021 Jul 22. J Exp Biol. 2021. PMID: 34292320
-
Patterns of mechanical energy change in tetrapod gait: pendula, springs and work.J Exp Zool A Comp Exp Biol. 2006 Nov 1;305(11):899-911. doi: 10.1002/jez.a.334. J Exp Zool A Comp Exp Biol. 2006. PMID: 17029267 Review.
-
Correlation of symmetrical gaits and whole body mechanics: debunking myths in locomotor biodynamics.J Exp Zool A Comp Exp Biol. 2006 Nov 1;305(11):923-34. doi: 10.1002/jez.a.332. J Exp Zool A Comp Exp Biol. 2006. PMID: 17029269 Review.
References
-
- Gray J. Studies in the mechanics of the tetrapod skeleton. J Exp Biol. 1944;20:88–117. - PubMed
-
- Hildebrand M. Symmetrical gaits of primates. Am J Phys Anthropol. 1967;26:119–130. doi: 10.1002/ajpa.1330260203. - DOI
-
- Rollinson JMM, Martin RD. Comparative aspects of primate locomotion, with special reference to arboreal cercopithecines. Symp Zool Soc Lond. 1981;48:377–427.
-
- Hildebrand M. Walking and running. In: Hildebrand M, Bramble DM, Liem KF, Wake DB, editors. Functional vertebrate morphology. Cambridge, MA: Belknap Press of Harvard University Press; 1985. pp. 38–57.
-
- Cartmill M, Lemelin P, Schmitt D. Support polygons and symmetrical gaits in mammals. Zool J Linnean Soc. 2002;136:401–420. doi: 10.1046/j.1096-3642.2002.00038.x. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
