

Haptic Error Modulation Outperforms Visual Error Amplification When Learning a Modified Gait Pattern
- PMID: 30837824
- PMCID: PMC6390202
- DOI: 10.3389/fnins.2019.00061
Haptic Error Modulation Outperforms Visual Error Amplification When Learning a Modified Gait Pattern
Abstract
Robotic algorithms that augment movement errors have been proposed as promising training strategies to enhance motor learning and neurorehabilitation. However, most research effort has focused on rehabilitation of upper limbs, probably because large movement errors are especially dangerous during gait training, as they might result in stumbling and falling. Furthermore, systematic large movement errors might limit the participants' motivation during training. In this study, we investigated the effect of training with novel error modulating strategies, which guarantee a safe training environment, on motivation and learning of a modified asymmetric gait pattern. Thirty healthy young participants walked in the exoskeletal robotic system Lokomat while performing a foot target-tracking task, which required an increased hip and knee flexion in the dominant leg. Learning the asymmetric gait pattern with three different strategies was evaluated: (i) No disturbance: no robot disturbance/guidance was applied, (ii) haptic error amplification: unsafe and discouraging large errors were limited with haptic guidance, while haptic error amplification enhanced awareness of small errors relevant for learning, and (iii) visual error amplification: visually observed errors were amplified in a virtual reality environment. We also evaluated whether increasing the movement variability during training by adding randomly varying haptic disturbances on top of the other training strategies further enhances learning. We analyzed participants' motor performance and self-reported intrinsic motivation before, during and after training. We found that training with the novel haptic error amplification strategy did not hamper motor adaptation and enhanced transfer of the practiced asymmetric gait pattern to free walking. Training with visual error amplification, on the other hand, increased errors during training and hampered motor learning. Participants who trained with visual error amplification also reported a reduced perceived competence. Adding haptic disturbance increased the movement variability during training, but did not have a significant effect on motor adaptation, probably because training with haptic disturbance on top of visual and haptic error amplification decreased the participants' feelings of competence. The proposed novel haptic error modulating controller that amplifies small task-relevant errors while limiting large errors outperformed visual error augmentation and might provide a promising framework to improve robotic gait training outcomes in neurological patients.
Keywords: error amplification; force disturbance; haptic guidance; motor adaptation; motor learning; rehabilitation robotics; robotic gait-training; visual feedback.
Figures

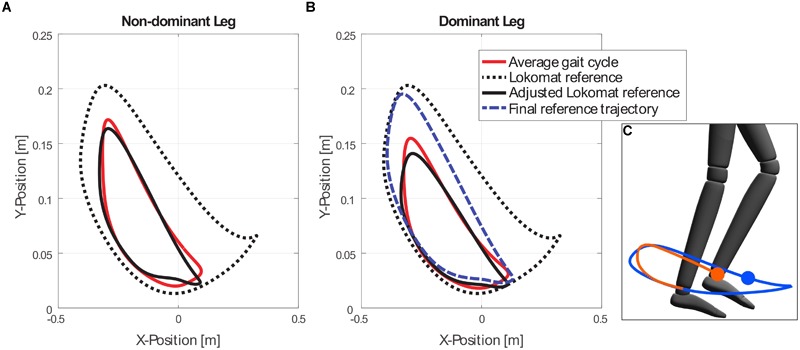
 Lok), and the final reference trajectory (θref) in the non-dominant (A), and dominant legs (B). The final trajectory is the result of increasing the hip and knee angle ROM of the dominant leg by 20%. The final reference ankle trajectory was shown on the screen (C) together with the actual ankle position and an avatar representation of the legs (with dominant leg on top).
Lok), and the final reference trajectory (θref) in the non-dominant (A), and dominant legs (B). The final trajectory is the result of increasing the hip and knee angle ROM of the dominant leg by 20%. The final reference ankle trajectory was shown on the screen (C) together with the actual ankle position and an avatar representation of the legs (with dominant leg on top).
References
-
- Abuhamdeh S., Csikszentmihalyi M., Jalal B. (2015). Enjoying the possibility of defeat: outcome uncertainty, suspense, and intrinsic motivation. Motiv. Emot. 39 1–10. 10.1007/s11031-014-9425-2 - DOI
-
- Ach N. (1935). Analyse des willens. [Analysis of will]. Handb. Biol. Arbeitsmethoden Abt. 6:460.
-
- Ávila L. T. G., Chiviacowsky S., Wulf G., Lewthwaite R. (2012). Positive social-comparative feedback enhances motor learning in children. Psychol. Sport Exerc. 13 849–853. 10.1016/j.psychsport.2012.07.001 - DOI
-
- Bartenbach V., Wyss D., Seuret D., Riener R. (2015). “A lower limb exoskeleton research platform to investigate human-robot interaction,” in Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics (ICORR) (Piscataway, NJ: IEEE; ) 600–605. 10.1109/ICORR.2015.7281266 - DOI
-
- Basalp E., Gerig N., Marchal-Crespo L., Sigrist R., Riener R., Wolf P. (2016). “Visual augmentation of spatiotemporal errors in a rowing task,” in Proceedings of the 11th Joint Conference on Motor Control & Learning, Biomechanics & Training (Darmstadt: Shaker Verlag GmbH; ).
LinkOut - more resources
Full Text Sources