

Interactive Flying Frustums (IFFs): spatially aware surgical data visualization
- PMID: 30863981
- PMCID: PMC7357290
- DOI: 10.1007/s11548-019-01943-z
Interactive Flying Frustums (IFFs): spatially aware surgical data visualization
Abstract
Purpose: As the trend toward minimally invasive and percutaneous interventions continues, the importance of appropriate surgical data visualization becomes more evident. Ineffective interventional data display techniques that yield poor ergonomics that hinder hand-eye coordination, and therefore promote frustration which can compromise on-task performance up to adverse outcome. A very common example of ineffective visualization is monitors attached to the base of mobile C-arm X-ray systems.
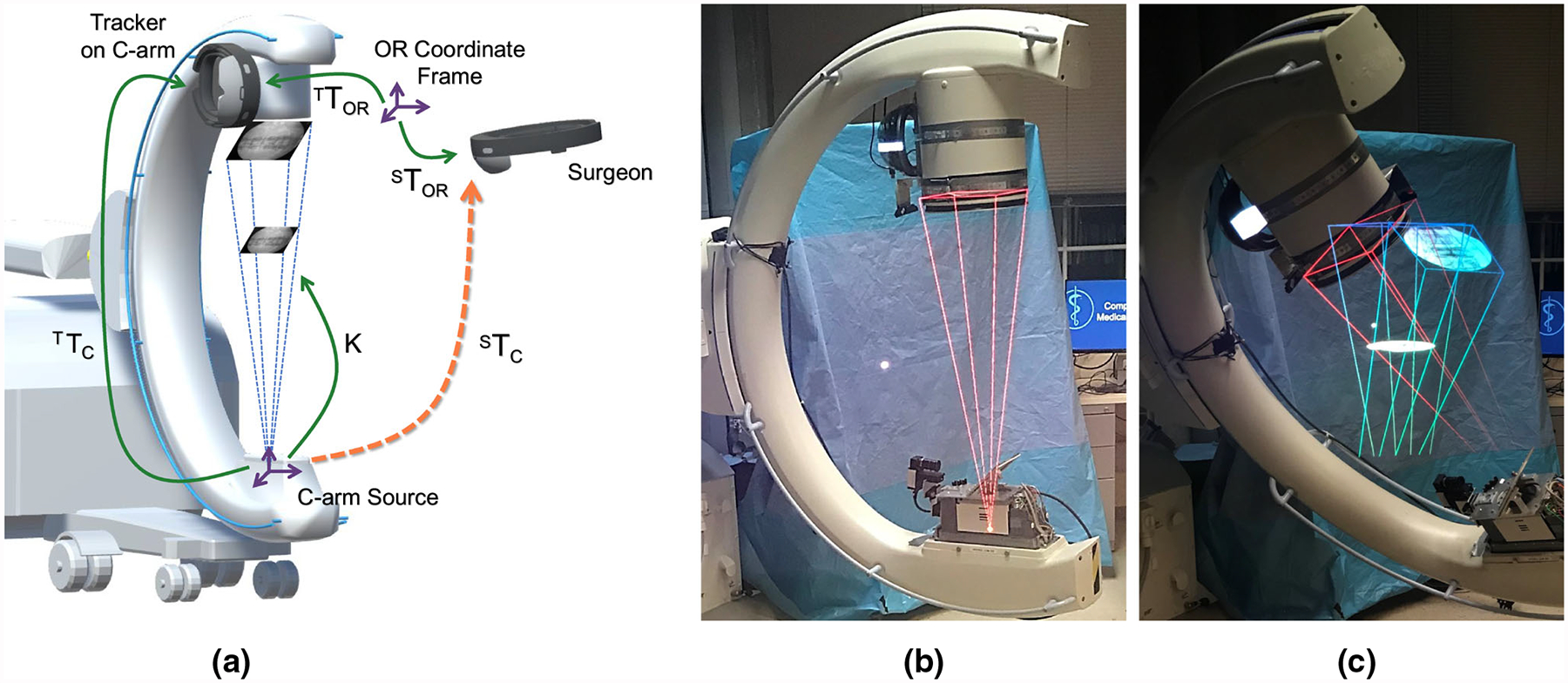
Methods: We present a spatially and imaging geometry-aware paradigm for visualization of fluoroscopic images using Interactive Flying Frustums (IFFs) in a mixed reality environment. We exploit the fact that the C-arm imaging geometry can be modeled as a pinhole camera giving rise to an 11-degree-of-freedom view frustum on which the X-ray image can be translated while remaining valid. Visualizing IFFs to the surgeon in an augmented reality environment intuitively unites the virtual 2D X-ray image plane and the real 3D patient anatomy. To achieve this visualization, the surgeon and C-arm are tracked relative to the same coordinate frame using image-based localization and mapping, with the augmented reality environment being delivered to the surgeon via a state-of-the-art optical see-through head-mounted display.
Results: The root-mean-squared error of C-arm source tracking after hand-eye calibration was determined as [Formula: see text] and [Formula: see text] in rotation and translation, respectively. Finally, we demonstrated the application of spatially aware data visualization for internal fixation of pelvic fractures and percutaneous vertebroplasty.
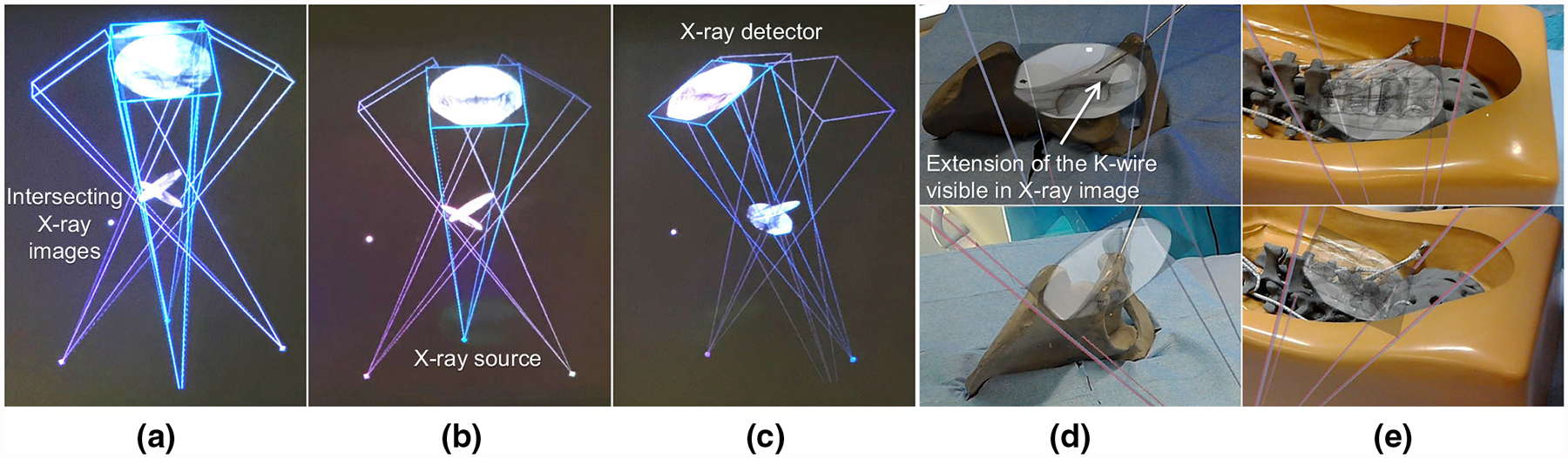
Conclusion: Our spatially aware approach to transmission image visualization effectively unites patient anatomy with X-ray images by enabling spatial image manipulation that abides image formation. Our proof-of-principle findings indicate potential applications for surgical tasks that mostly rely on orientational information such as placing the acetabular component in total hip arthroplasty, making us confident that the proposed augmented reality concept can pave the way for improving surgical performance and visuo-motor coordination in fluoroscopy-guided surgery.
Keywords: Augmented reality; Fluoroscopy; Frustum; Surgical data visualization.
Conflict of interest statement
Figures
References
-
- Alambeigi F, Wang Y, Sefati S, Gao C, Murphy RJ, Iordachita I, Taylor RH, Khanuja H, Armand M (2017) A curved-drilling approach in core decompression of the femoral head osteonecrosis using a continuum manipulator. IEEE Robot Autom Lett 2(3):1480–1487
-
- Assarsson U, Moller T (2000) Optimized view frustum culling algorithms for bounding boxes. J Graph Tools 5(1):9–22
-
- Atria C, Last L, Packard N, Noo F (2018) Cone beam tomosynthesis fluoroscopy: a new approach to 3d image guidance In: Medical imaging 2018: image-guided procedures, robotic interventions, and modeling, vol 10576 International Society for Optics and Photonics, p 105762V
-
- Augmedics: Augmedics xvision: Pre-clinical Cadaver Study (2018). https://www.augmedics.com/cadaver-study. Accessed 24 Oct 2018
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
