

Robot-Assisted Eccentric Contraction Training of the Tibialis Anterior Muscle Based on Position and Force Sensing
- PMID: 30875743
- PMCID: PMC6471833
- DOI: 10.3390/s19061288
Robot-Assisted Eccentric Contraction Training of the Tibialis Anterior Muscle Based on Position and Force Sensing
Abstract
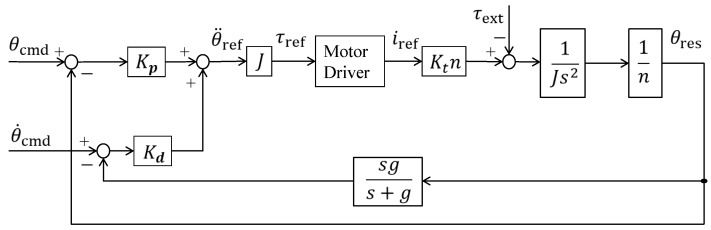
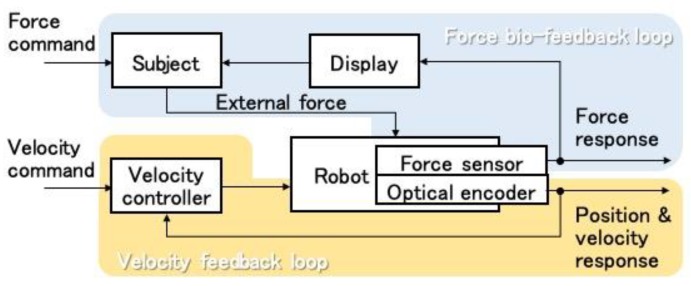
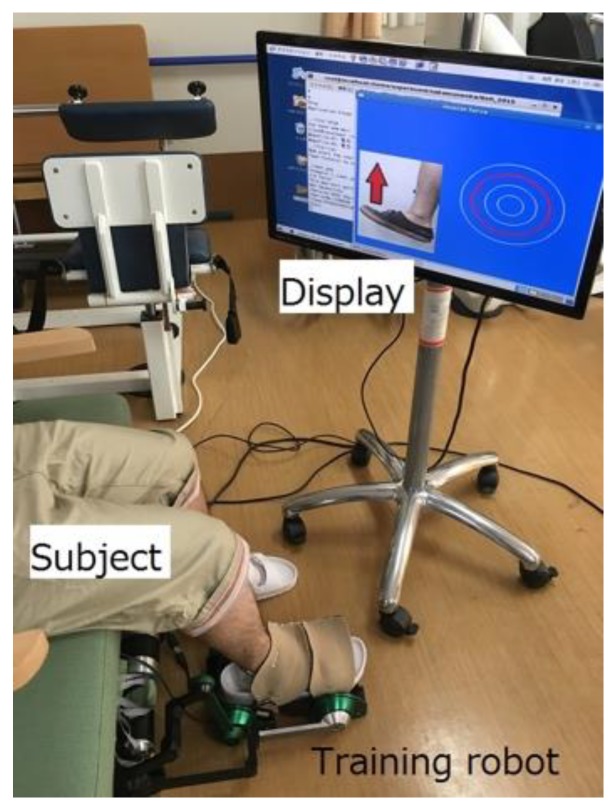
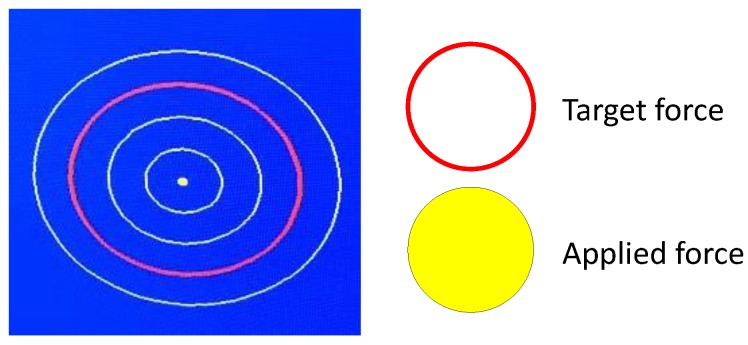
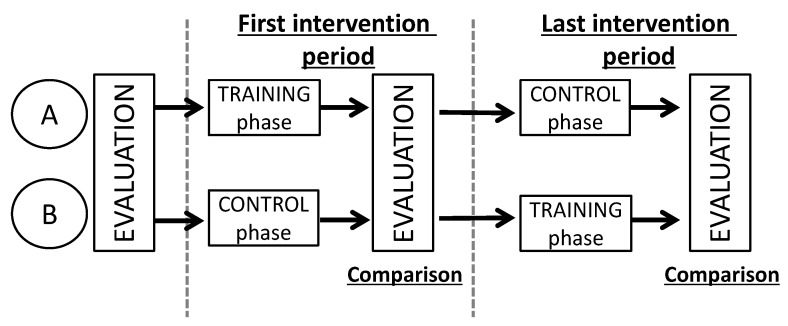
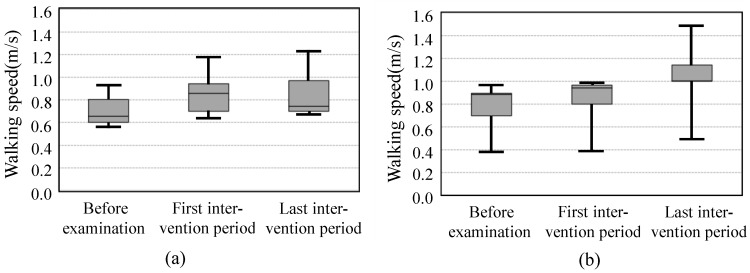
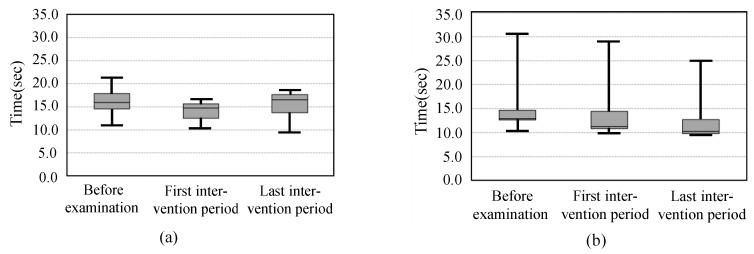
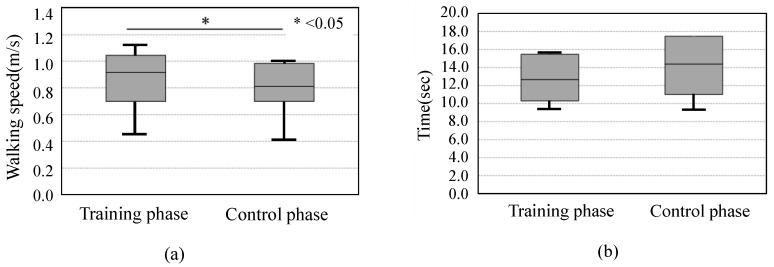
The purpose of this study was to determine the clinical effects of a training robot that induced eccentric tibialis anterior muscle contraction by controlling the strength and speed. The speed and the strength are controlled simultaneously by introducing robot training with two different feedbacks: velocity feedback in the robot controller and force bio-feedback based on force visualization. By performing quantitative eccentric contraction training, it is expected that the fall risk reduces owing to the improved muscle function. Evaluation of 11 elderly participants with months training period was conducted through a cross-over comparison test. The results of timed up and go (TUG) tests and 5 m walking tests were compared. The intergroup comparison was done using the Kruskal-Wallis test. The results of cross-over test indicated no significant difference between the 5-m walking time measured after the training and control phases. However, there was a trend toward improvement, and a significant difference was observed between the training and control phases in all subjects.
Keywords: force sensing; position sensing; rehabilitation; training robot.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

References
-
- United Nations Department of Economics and Social Affairs, Population Division. [(accessed on 28 September 2018)]; Available online: http://www.un.org/en/development/desa/population/publications/pdf/ageing....
-
- WHO World Health Statistics 2006. [(accessed on 28 September 2018)]; Available online: http://www.who.int/gho/publications/world_health _statistics/whostat2006....
MeSH terms
LinkOut - more resources
Full Text Sources
