

SEIS: Insight's Seismic Experiment for Internal Structure of Mars
- PMID: 30880848
- PMCID: PMC6394762
- DOI: 10.1007/s11214-018-0574-6
SEIS: Insight's Seismic Experiment for Internal Structure of Mars
Abstract
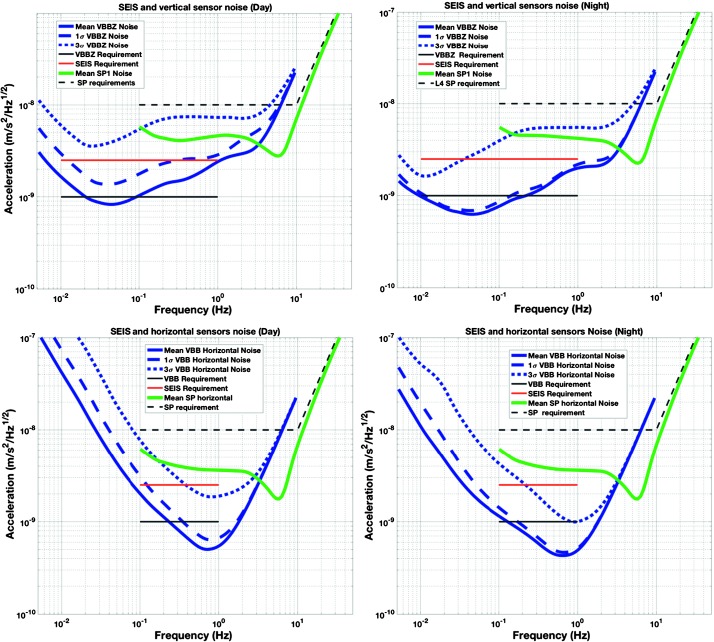
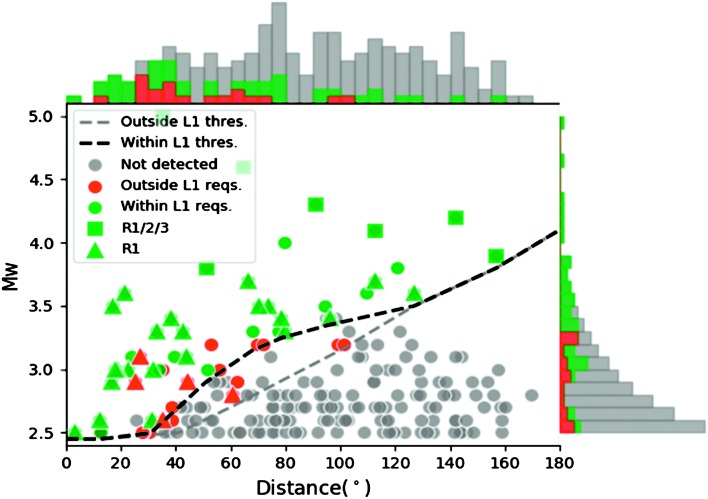
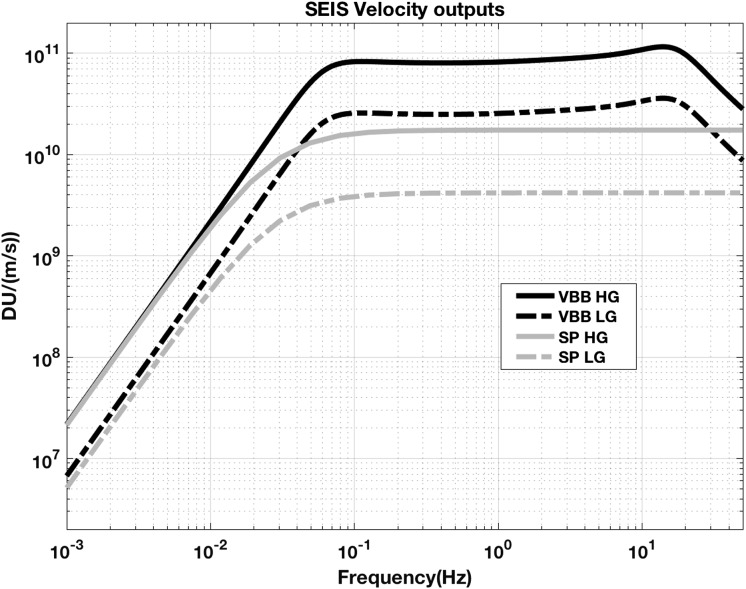
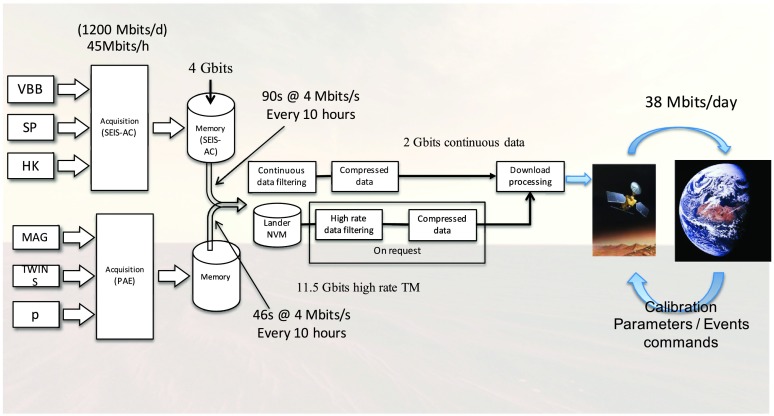
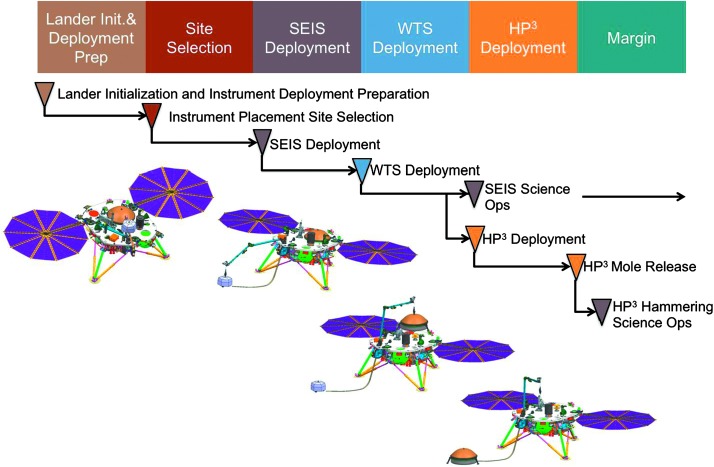
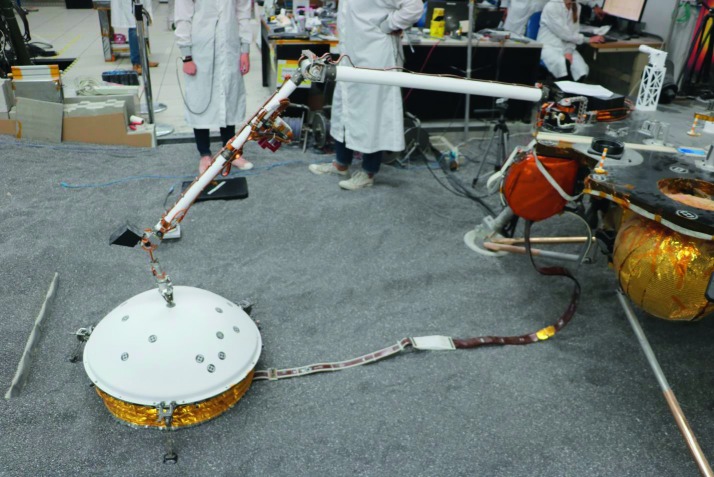
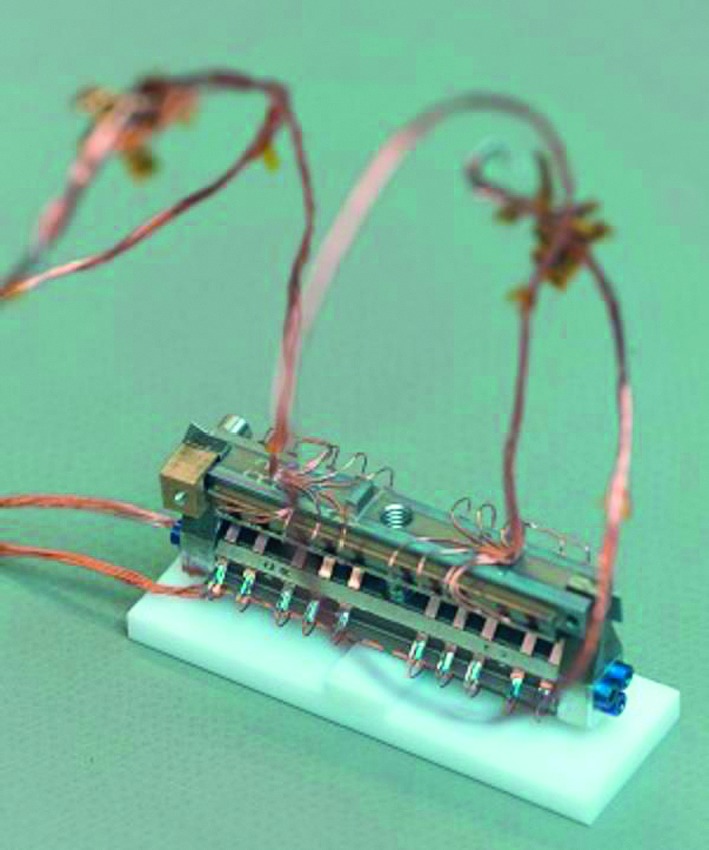
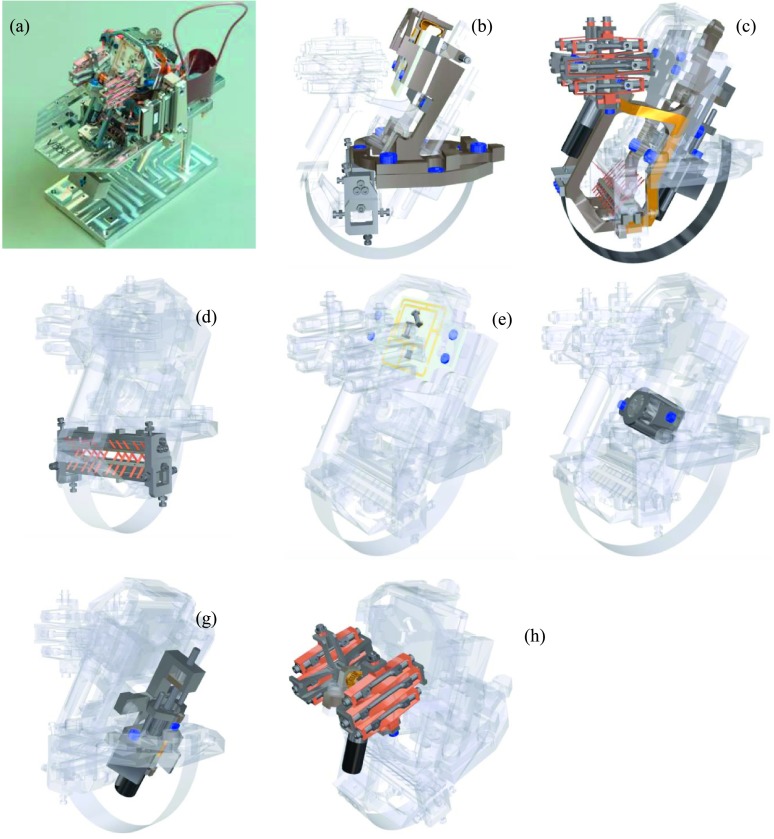
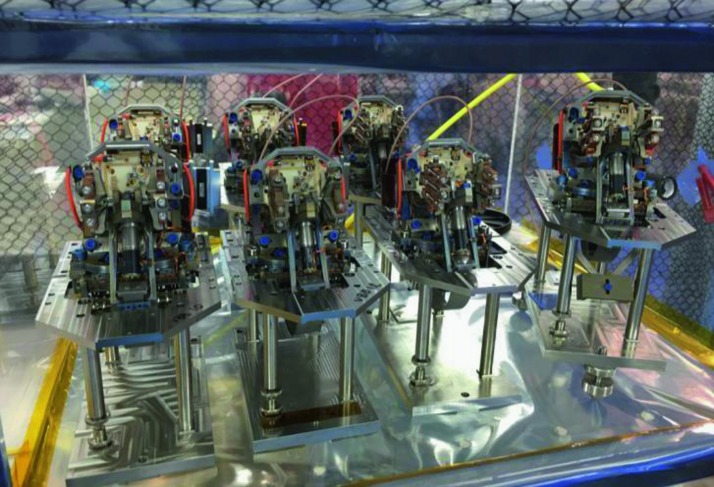
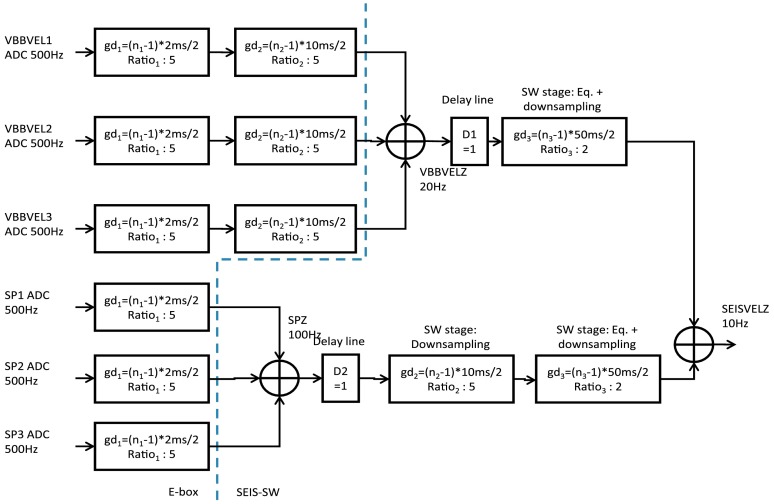
By the end of 2018, 42 years after the landing of the two Viking seismometers on Mars, InSight will deploy onto Mars' surface the SEIS (Seismic Experiment for Internal Structure) instrument; a six-axes seismometer equipped with both a long-period three-axes Very Broad Band (VBB) instrument and a three-axes short-period (SP) instrument. These six sensors will cover a broad range of the seismic bandwidth, from 0.01 Hz to 50 Hz, with possible extension to longer periods. Data will be transmitted in the form of three continuous VBB components at 2 sample per second (sps), an estimation of the short period energy content from the SP at 1 sps and a continuous compound VBB/SP vertical axis at 10 sps. The continuous streams will be augmented by requested event data with sample rates from 20 to 100 sps. SEIS will improve upon the existing resolution of Viking's Mars seismic monitoring by a factor of at 1 Hz and at 0.1 Hz. An additional major improvement is that, contrary to Viking, the seismometers will be deployed via a robotic arm directly onto Mars' surface and will be protected against temperature and wind by highly efficient thermal and wind shielding. Based on existing knowledge of Mars, it is reasonable to infer a moment magnitude detection threshold of at epicentral distance and a potential to detect several tens of quakes and about five impacts per year. In this paper, we first describe the science goals of the experiment and the rationale used to define its requirements. We then provide a detailed description of the hardware, from the sensors to the deployment system and associated performance, including transfer functions of the seismic sensors and temperature sensors. We conclude by describing the experiment ground segment, including data processing services, outreach and education networks and provide a description of the format to be used for future data distribution.
Electronic supplementary material: The online version of this article (10.1007/s11214-018-0574-6) contains supplementary material, which is available to authorized users.
Keywords: InSight; Mars seismology.
Figures






























References
-
- H. Abarca, R. Deen et al., Image and data processing for InSight lander operations and science. Space Sci. Rev. (2018 this issue)
-
- Ackerley N. Principles of broadband seismometry. In: Beer M., Kougioumtzoglou I.A., Patelli E., Siu-Kui Au I., editors. Encyclopedia of Earthquake Engineering. Berlin: Springer; 2014.
-
- Agnew D.C. History of seismology. Int. Geophys. Ser. 2002;81:3–11. doi: 10.1016/S0074-6142(02)80203-0. - DOI
-
- Anderson D.L., Given J. Absorption band Q model for the Earth. J. Geophys. Res. 1982;87:3893–3904. doi: 10.1029/JB087iB05p03893. - DOI
-
- Anderson D.L., Miller W.F., Latham G.V., Nakamura Y., Toksoz M.N., Dainty A.M., Duennebier F.K., Lazarewicz A.R., Kowach R.L., Knight T.C. Seismology on Mars. J. Geophys. Res. 1977;82:4524–4546. doi: 10.1029/JS082i028p04524. - DOI
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous