

Development and Characterization of Thermal Flow Sensors for Non-Invasive Measurements in HVAC Systems
- PMID: 30901894
- PMCID: PMC6471119
- DOI: 10.3390/s19061397
Development and Characterization of Thermal Flow Sensors for Non-Invasive Measurements in HVAC Systems
Abstract
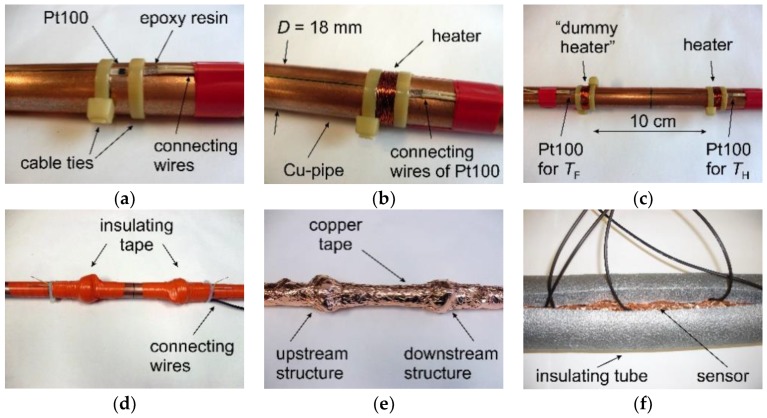
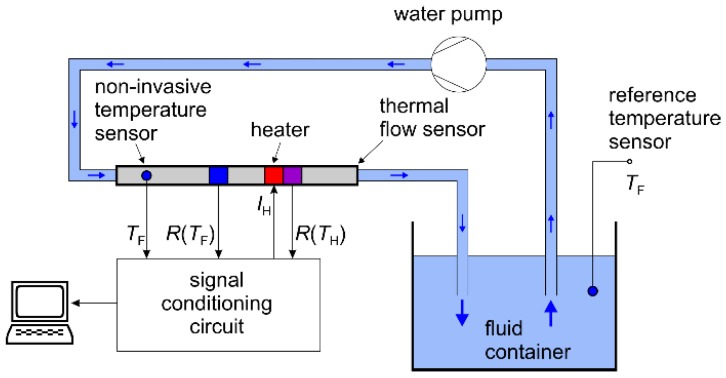
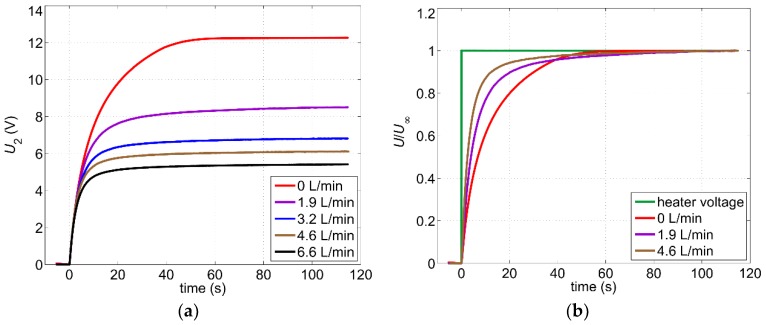
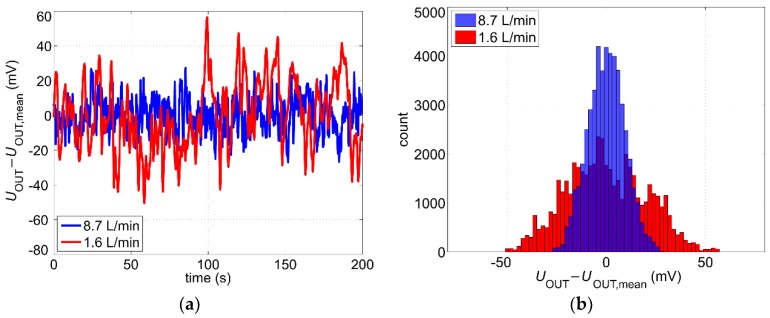
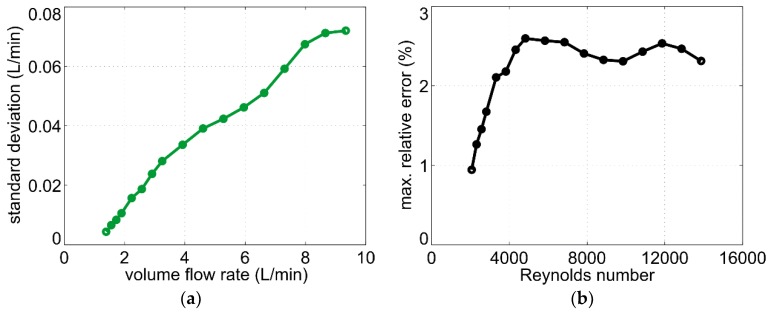
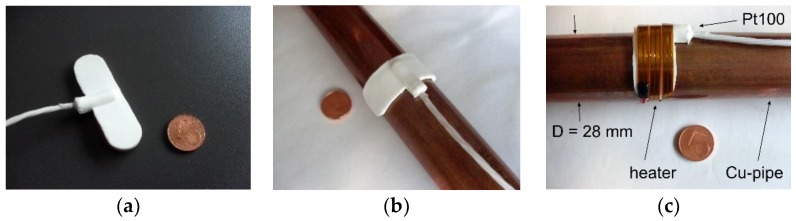
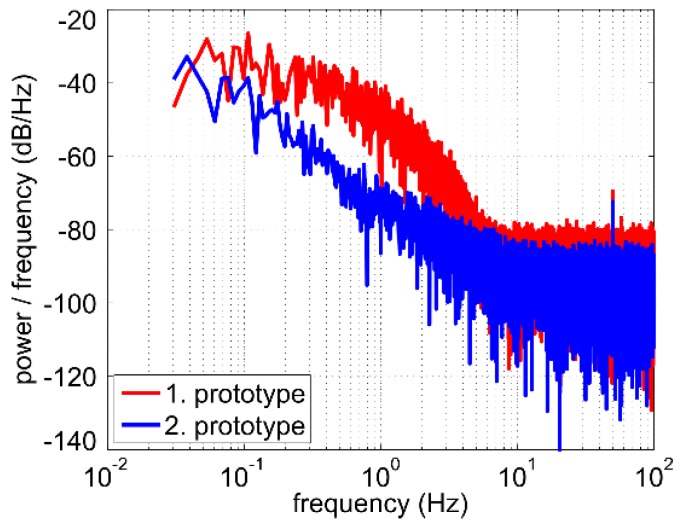
We investigated non-invasive flow rate measurements in heating, ventilation, and air conditioning (HVAC) systems utilizing thermal transduction instead of commonly used ultrasonic techniques. The proposed thermal flow transduction comprises two temperature sensors and a heater, all mounted non-invasively on the outer surface of metal-pipes and, therefore, not disturbing the fluid flow inside. One temperature sensor measures the heater temperature, whereas the other one, mounted upstream of the heater, follows the fluid temperature for reference. The temperature difference (i.e., the heater excess temperature) depends on the fluid flow velocity and can be used to derive the mean volume flow inside the pipe. Experimental characterizations were conducted using two sensor prototypes. Beside output characteristics, other main issues such as dynamic behavior and noise density were investigated in detail. Special attention was paid to error compensation allowing measurements within a large range of fluid temperatures. Measurement results confirm the feasibility of this approach, however with some constraints regarding response time.
Keywords: HVAC systems; non-invasive flow rate measurement; thermal flow sensor.
Conflict of interest statement
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Figures











References
-
- Allouhi A., El Fouih Y., Kousksou T., Jamil A., Zeraouli Y., Mourad Y. Energy consumption and efficiency in buildings: Current status and future trends. J. Clean. Prod. 2015;109:118–130. doi: 10.1016/j.jclepro.2015.05.139. - DOI
-
- Cao X., Dai X., Liu J. Building energy-consumption status worldwide and the state-of-art technologies for zero-energy buildings during the past decade. Energy Build. 2016;128:198–213. doi: 10.1016/j.enbuild.2016.06.089. - DOI
-
- Treado S., Chen Y. Saving Building Energy through Advanced Control Strategies. Energies. 2013;6:4769–4785. doi: 10.3390/en6094769. - DOI
-
- Elwenspoek M. Thermal flow micro sensors; Proceedings of the International Semiconductor Conference; Sinaia, Romania. 5–9 October 1999; pp. 423–435. - DOI
-
- Nguyen N.T. Micromachined flow sensors―A review. Flow Meas. Instrum. 1997;8:7–16. doi: 10.1016/S0955-5986(97)00019-8. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
