

Continuous Analysis of Running Mechanics by Means of an Integrated INS/GPS Device
- PMID: 30917610
- PMCID: PMC6470487
- DOI: 10.3390/s19061480
Continuous Analysis of Running Mechanics by Means of an Integrated INS/GPS Device
Abstract
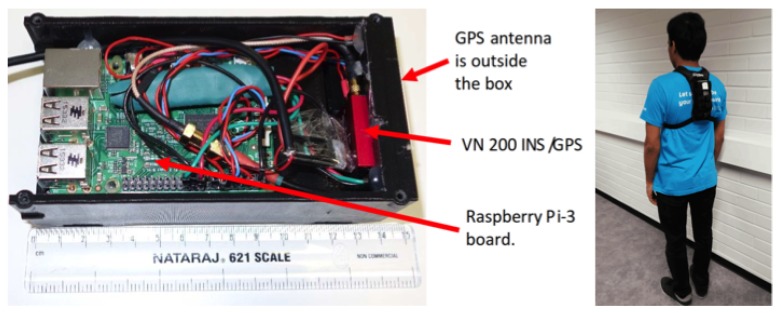
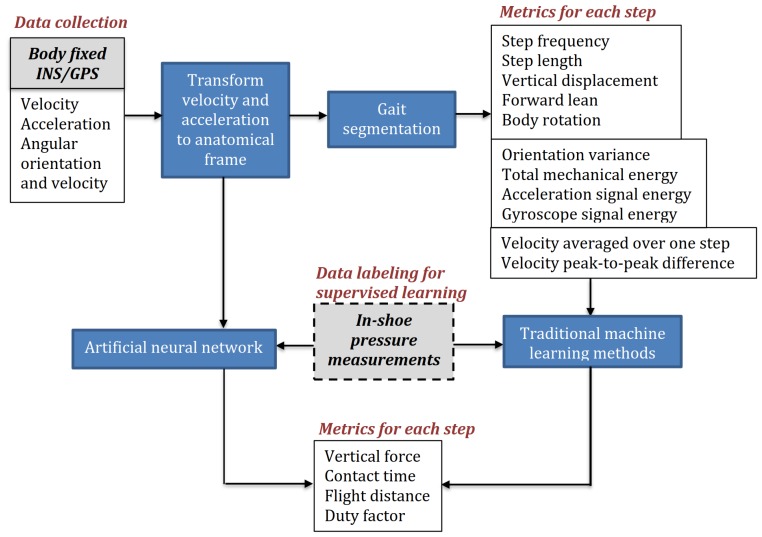
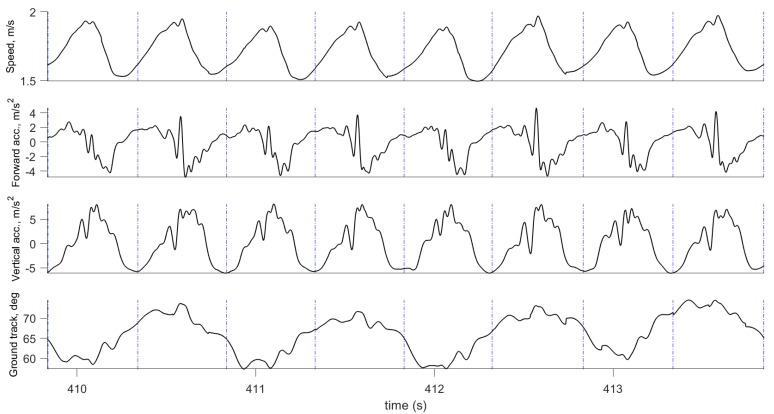
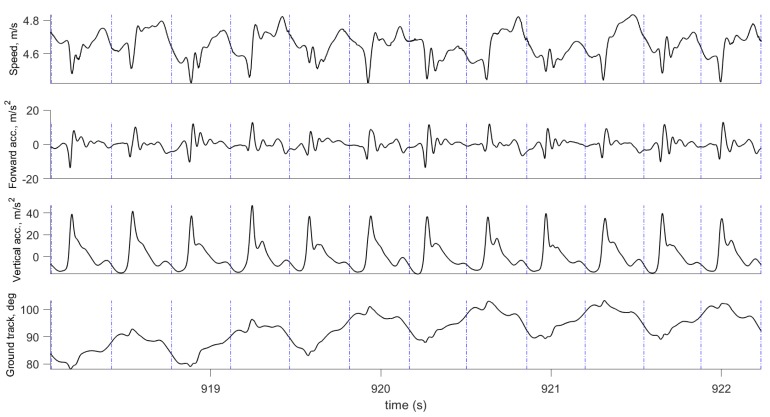
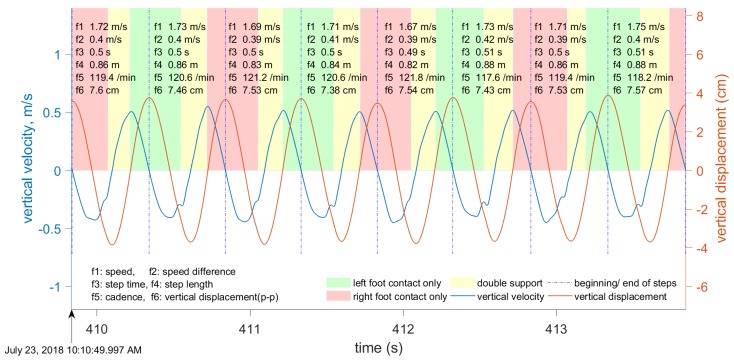
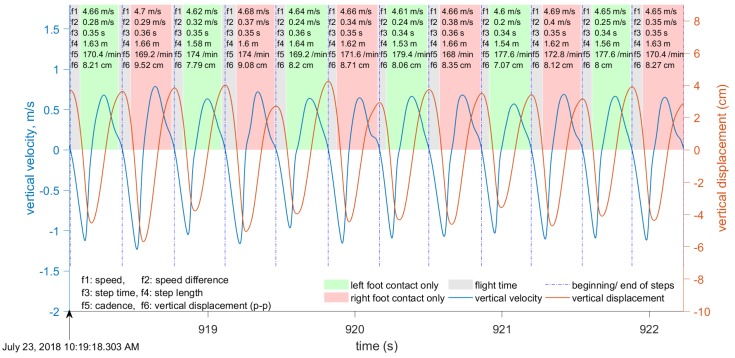
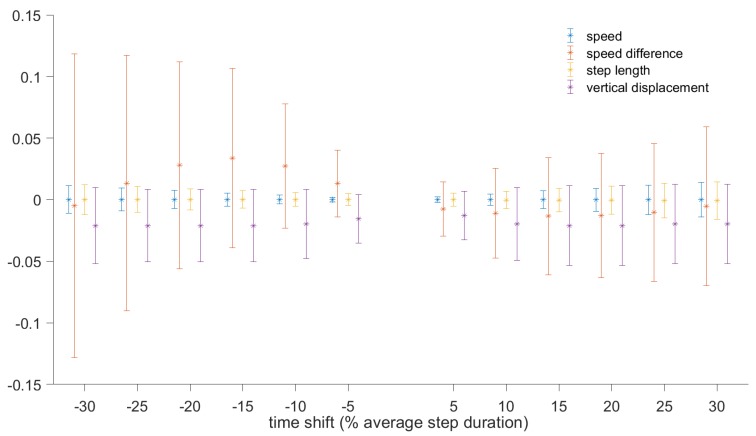
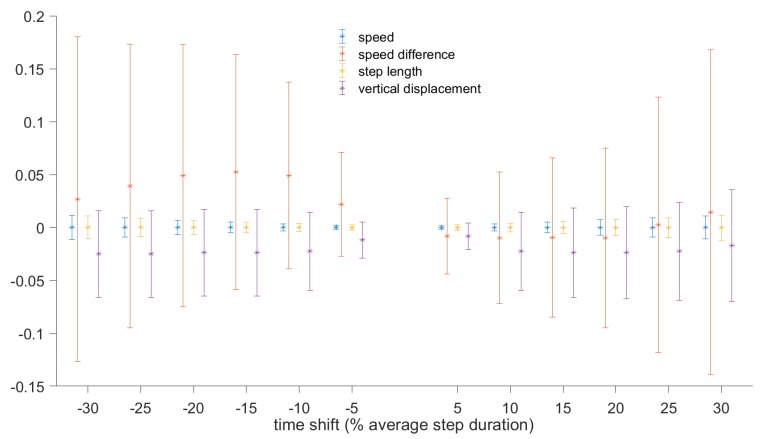
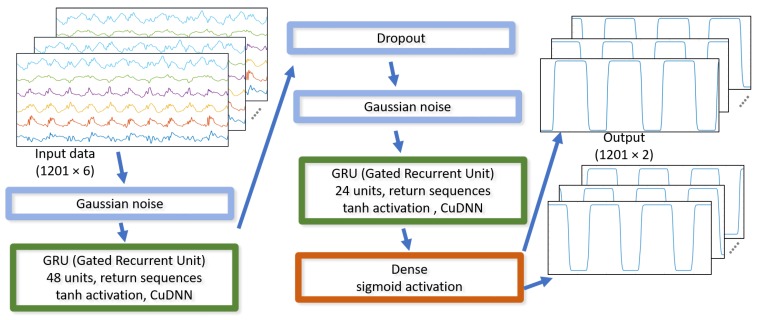
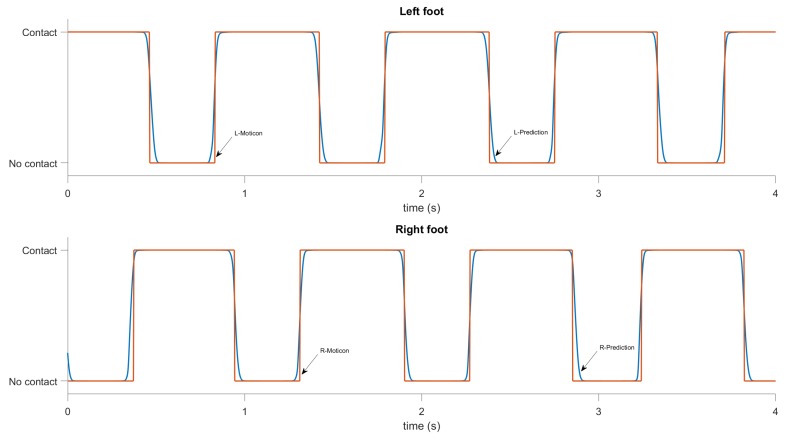
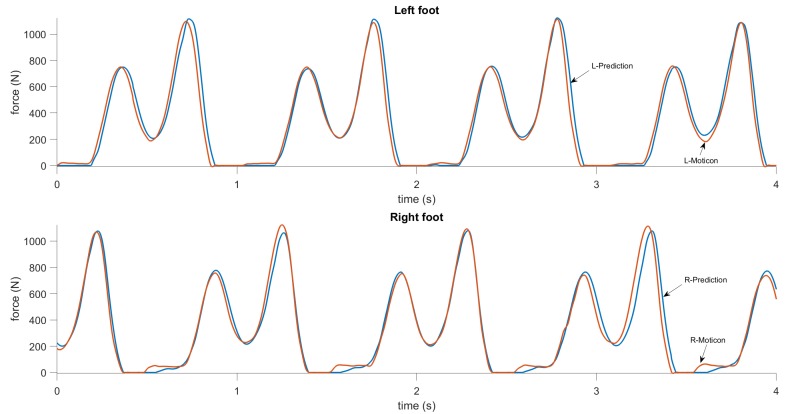
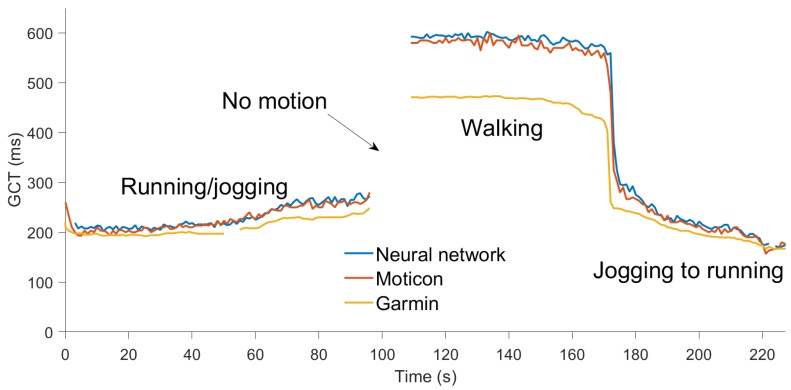
This paper describes a single body-mounted sensor that integrates accelerometers, gyroscopes, compasses, barometers, a GPS receiver, and a methodology to process the data for biomechanical studies. The sensor and its data processing system can accurately compute the speed, acceleration, angular velocity, and angular orientation at an output rate of 400 Hz and has the ability to collect large volumes of ecologically-valid data. The system also segments steps and computes metrics for each step. We analyzed the sensitivity of these metrics to changing the start time of the gait cycle. Along with traditional metrics, such as cadence, speed, step length, and vertical oscillation, this system estimates ground contact time and ground reaction forces using machine learning techniques. This equipment is less expensive and cumbersome than the currently used alternatives: Optical tracking systems, in-shoe pressure measurement systems, and force plates. Another advantage, compared to existing methods, is that natural movement is not impeded at the expense of measurement accuracy. The proposed technology could be applied to different sports and activities, including walking, running, motion disorder diagnosis, and geriatric studies. In this paper, we present the results of tests in which the system performed real-time estimation of some parameters of walking and running which are relevant to biomechanical research. Contact time and ground reaction forces computed by the neural network were found to be as accurate as those obtained by an in-shoe pressure measurement system.
Keywords: INS/GPS; gait analysis; machine learning; neural networks; sports equipment; velocity measurement.
Conflict of interest statement
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Figures
References
-
- Fleming P., Young C., Dixon S., Carré M. Athlete and coach perceptions of technology needs for evaluating running performance. Sport. Eng. 2010;13:1–18. doi: 10.1007/s12283-010-0049-9. - DOI
-
- Aminian K., Najafi B. Capturing human motion using body-fixed sensors: Outdoor measurement and clinical applications. Comput. Animat. Virtual Worlds. 2004;15:79–94. doi: 10.1002/cav.2. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
