

Robust mouse tracking in complex environments using neural networks
- PMID: 30937403
- PMCID: PMC6440983
- DOI: 10.1038/s42003-019-0362-1
Robust mouse tracking in complex environments using neural networks
Abstract
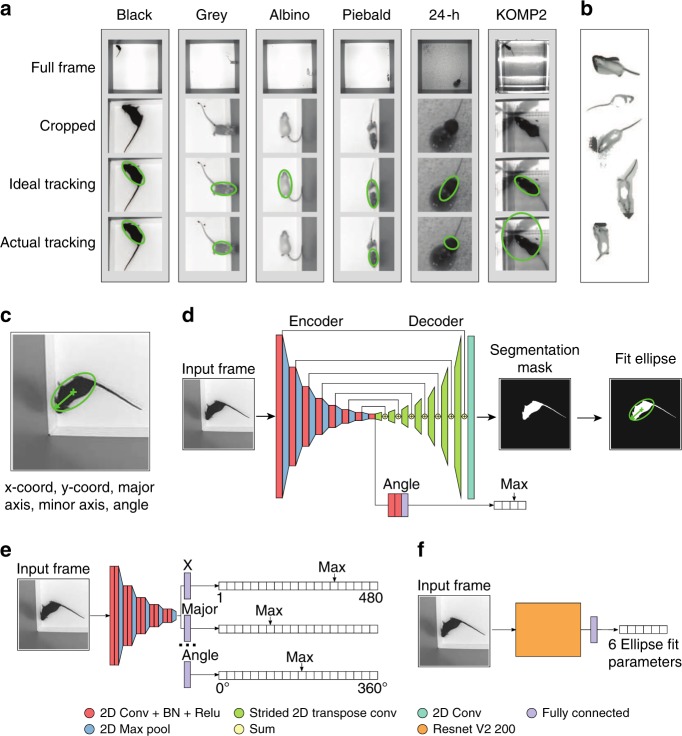
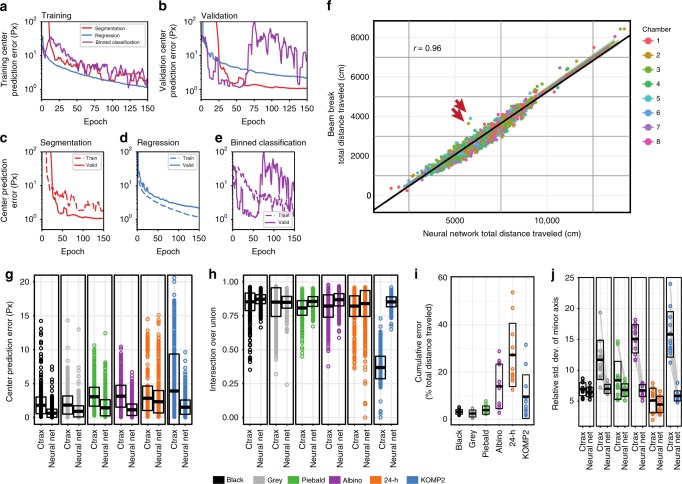
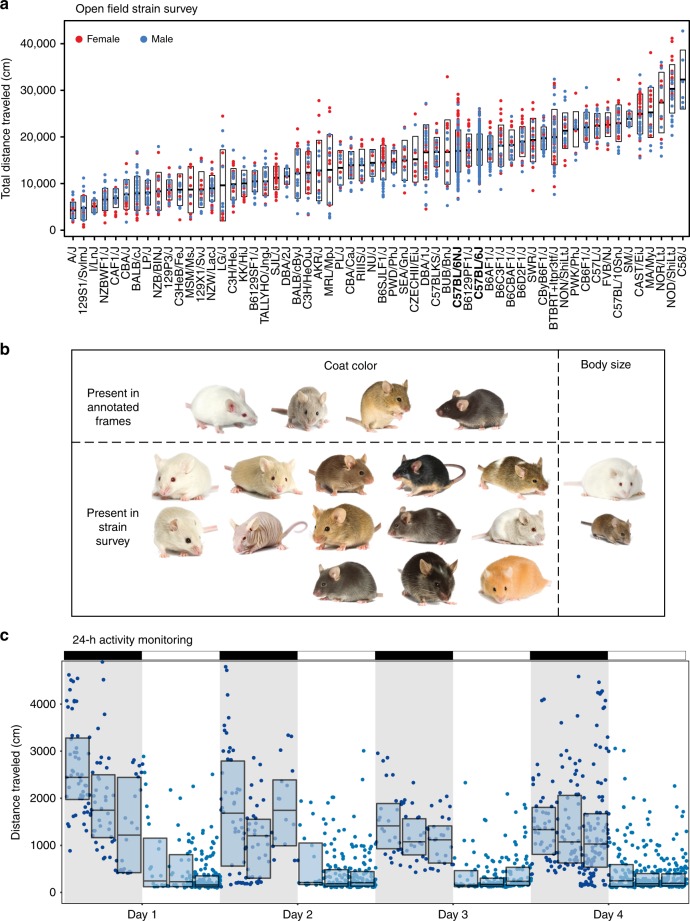
The ability to track animals accurately is critical for behavioral experiments. For video-based assays, this is often accomplished by manipulating environmental conditions to increase contrast between the animal and the background in order to achieve proper foreground/background detection (segmentation). Modifying environmental conditions for experimental scalability opposes ethological relevance. The biobehavioral research community needs methods to monitor behaviors over long periods of time, under dynamic environmental conditions, and in animals that are genetically and behaviorally heterogeneous. To address this need, we applied a state-of-the-art neural network-based tracker for single mice. We compare three different neural network architectures across visually diverse mice and different environmental conditions. We find that an encoder-decoder segmentation neural network achieves high accuracy and speed with minimal training data. Furthermore, we provide a labeling interface, labeled training data, tuned hyperparameters, and a pretrained network for the behavior and neuroscience communities.
Conflict of interest statement
The authors declare no competing interests.
Figures
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Molecular Biology Databases
