

Autonomous patch-clamp robot for functional characterization of neurons in vivo: development and application to mouse visual cortex
- PMID: 30969898
- PMCID: PMC6620702
- DOI: 10.1152/jn.00738.2018
Autonomous patch-clamp robot for functional characterization of neurons in vivo: development and application to mouse visual cortex
Abstract
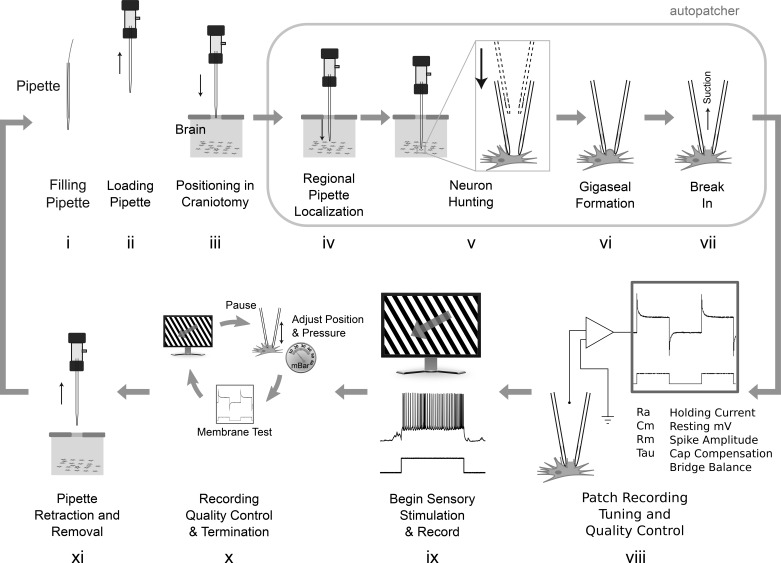
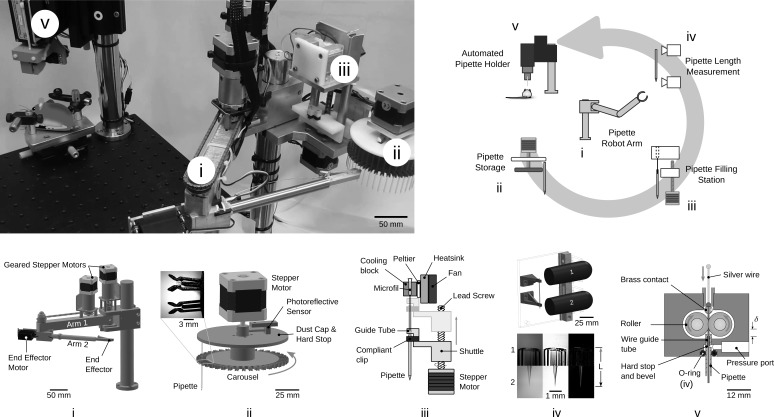
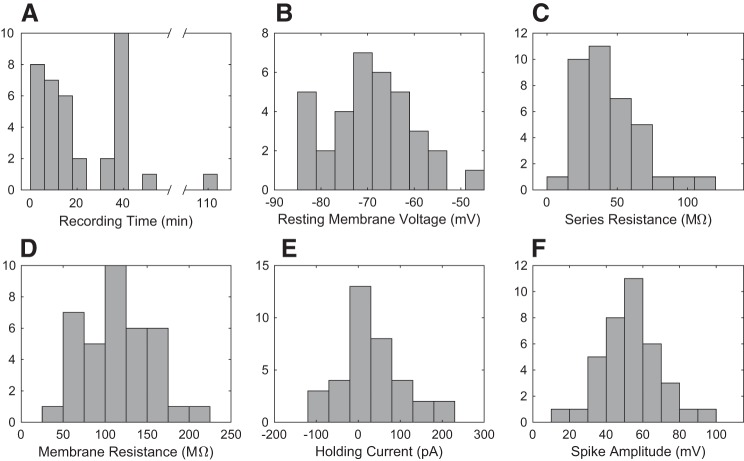
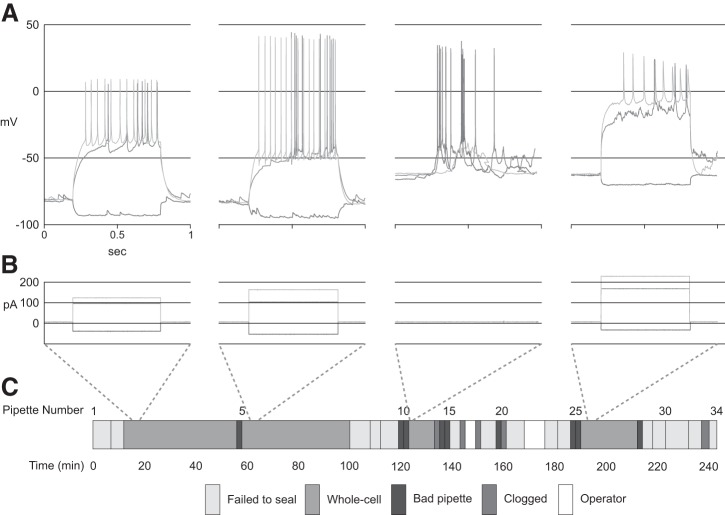
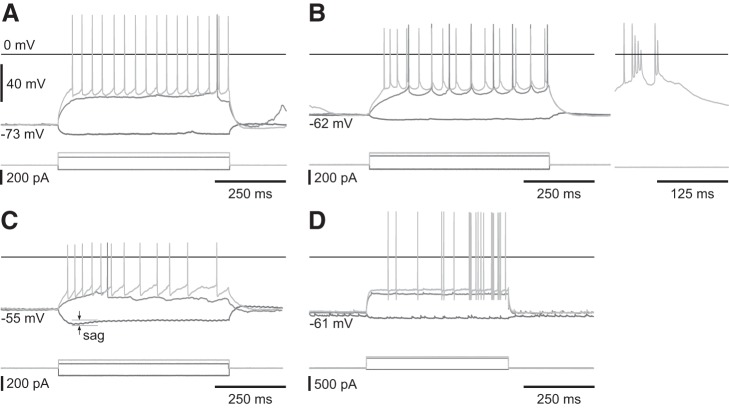
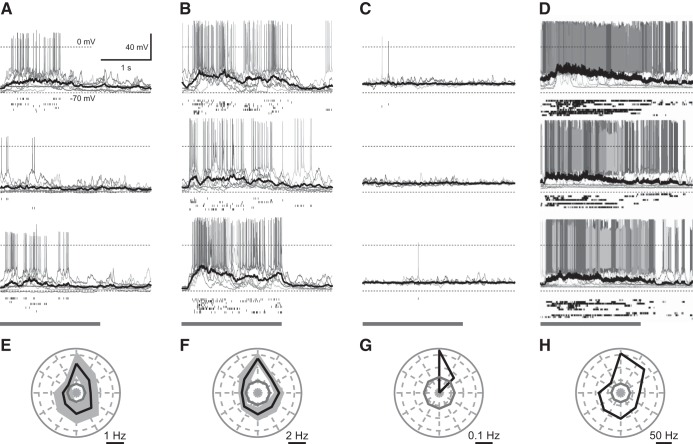
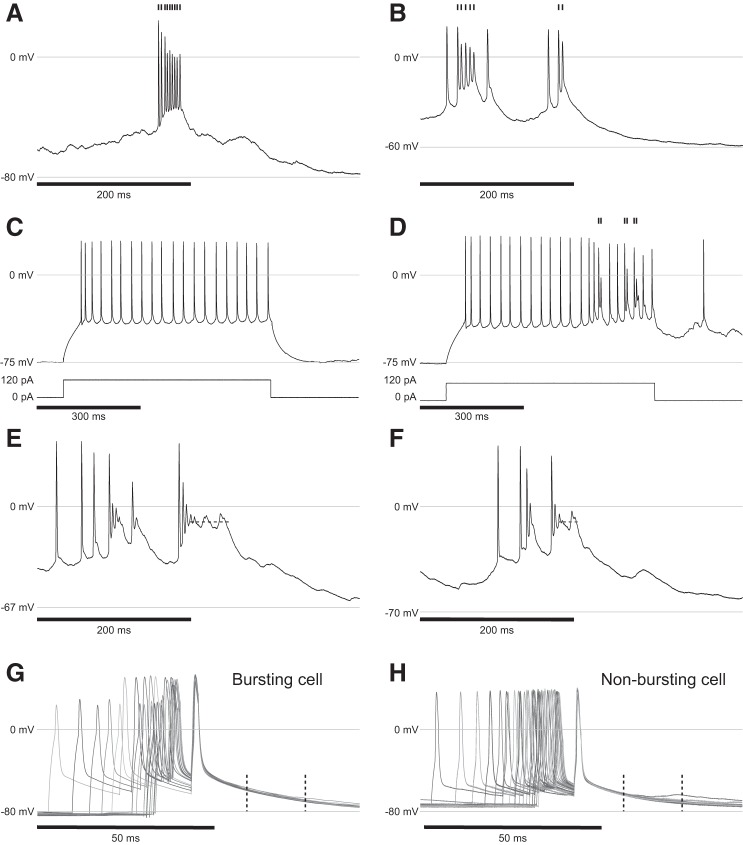
Patch clamping is the gold standard measurement technique for cell-type characterization in vivo, but it has low throughput, is difficult to scale, and requires highly skilled operation. We developed an autonomous robot that can acquire multiple consecutive patch-clamp recordings in vivo. In practice, 40 pipettes loaded into a carousel are sequentially filled and inserted into the brain, localized to a cell, used for patch clamping, and disposed. Automated visual stimulation and electrophysiology software enables functional cell-type classification of whole cell-patched cells, as we show for 37 cells in the anesthetized mouse in visual cortex (V1) layer 5. We achieved 9% yield, with 5.3 min per attempt over hundreds of trials. The highly variable and low-yield nature of in vivo patch-clamp recordings will benefit from such a standardized, automated, quantitative approach, allowing development of optimal algorithms and enabling scaling required for large-scale studies and integration with complementary techniques. NEW & NOTEWORTHY In vivo patch-clamp is the gold standard for intracellular recordings, but it is a very manual and highly skilled technique. The robot in this work demonstrates the most automated in vivo patch-clamp experiment to date, by enabling production of multiple, serial intracellular recordings without human intervention. The robot automates pipette filling, wire threading, pipette positioning, neuron hunting, break-in, delivering sensory stimulus, and recording quality control, enabling in vivo cell-type characterization.
Keywords: automated; in vivo; layer 5; patch clamp; robotic; visual cortex.
Conflict of interest statement
No conflicts of interest, financial or otherwise, are declared by the authors.
Figures

References
-
- Ascoli GA, Alonso-Nanclares L, Anderson SA, Barrionuevo G, Benavides-Piccione R, Burkhalter A, Buzsáki G, Cauli B, Defelipe J, Fairén A, Feldmeyer D, Fishell G, Fregnac Y, Freund TF, Gardner D, Gardner EP, Goldberg JH, Helmstaedter M, Hestrin S, Karube F, Kisvárday ZF, Lambolez B, Lewis DA, Marin O, Markram H, Muñoz A, Packer A, Petersen CCH, Rockland KS, Rossier J, Rudy B, Somogyi P, Staiger JF, Tamas G, Thomson AM, Toledo-Rodriguez M, Wang Y, West DC, Yuste R; Petilla Interneuron Nomenclature Group . Petilla terminology: nomenclature of features of GABAergic interneurons of the cerebral cortex. Nat Rev Neurosci 9: 557–568, 2008. doi:10.1038/nrn2402. - DOI - PMC - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources