

A concentric tube-based 4-DOF puncturing needle with a novel miniaturized actuation system for vitrectomy
- PMID: 30999918
- PMCID: PMC6472096
- DOI: 10.1186/s12938-019-0666-x
A concentric tube-based 4-DOF puncturing needle with a novel miniaturized actuation system for vitrectomy
Abstract
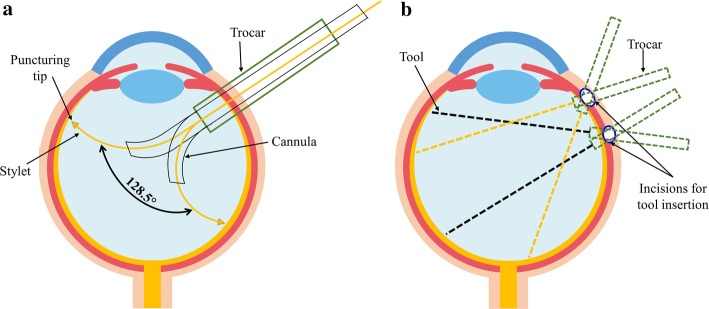
Background: Vitreoretinal surgeries require precise, dexterous, and steady instruments for operation in delicate parts of the eye. Robotics has presented solutions for many vitreoretinal surgical problems, but, in a few operations, the available tools are still not dexterous enough to carry out procedures with minimum trauma to patients. Vitrectomy is one of those procedures and requires some dexterous instruments to replace straight ones for better navigation to affected sides inside the eyeball.
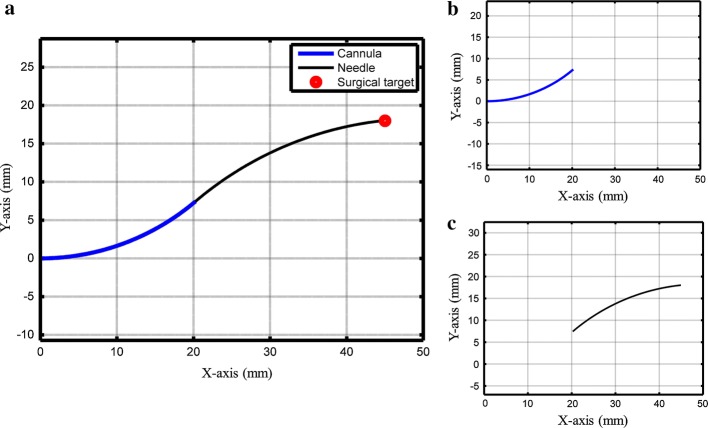
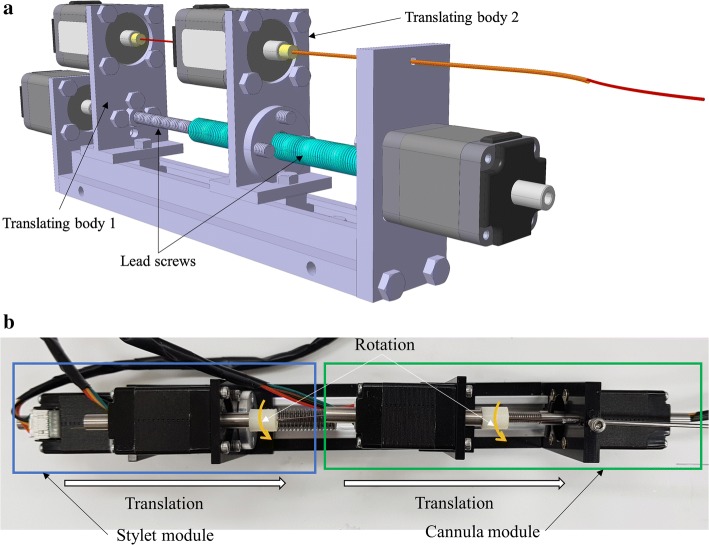
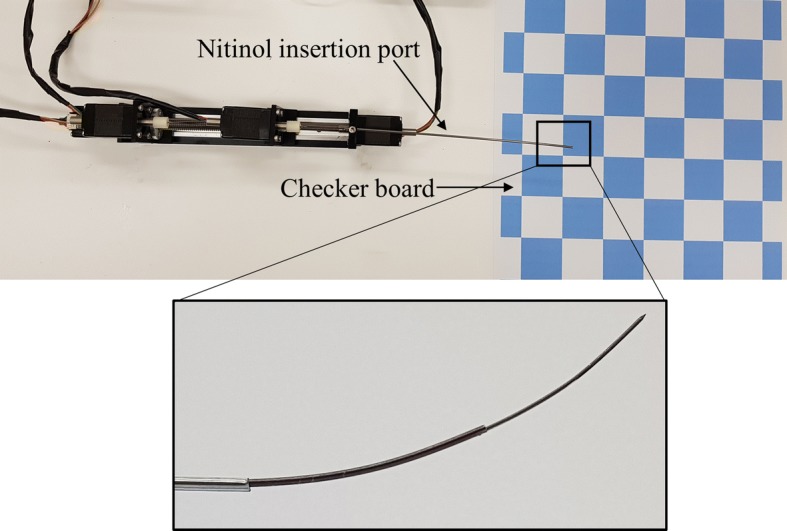
Method: In this paper, we propose a new vein puncturing solution with a 4-DOF motion to increase the workspace inside the eye. A two-member concentric tube-based 25G needle is proposed whose shape is optimized. To operate the concentric tube needle, a novel and miniaturized actuation system is proposed that uses hollow shaft motors for the first time. The presented prototype of actuation system has a stroke of 100 mm in a small size of 148 × 25 × 65 mm (L × W × H), suitable for approaching distant positions inside the eyeball.
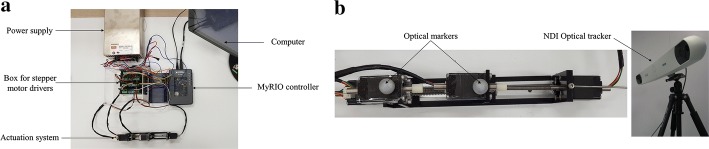
Results: Experimental results validate that the targeting accuracy of the needle is less than one millimeter and the needle tip can apply a force of 23.51 mN which is enough to perform puncturing. Furthermore, the proposed needle covers maximum workspace of around 128.5° inside the eyeball. For the actuation system, experiments show that it can produce repeatable motions with accuracy in submillimeter.
Conclusion: The proposed needle system can navigate to the sites which are difficult to approach by currently available straight tools requiring reinsertions. Along with the miniaturized actuation system, this work is expected to improve the outcome of vitrectomy with safe and accurate navigation.
Keywords: Concentric tube robots (CTR); Ophthalmic surgery; Puncturing needle; Vitrectomy.
Conflict of interest statement
The authors declare that they have no competing interests.
Figures






Similar articles
-
Flexible Needle Steering with Tethered and Untethered Actuation: Current States, Targeting Errors, Challenges and Opportunities.Ann Biomed Eng. 2023 May;51(5):905-924. doi: 10.1007/s10439-023-03163-8. Epub 2023 Mar 21. Ann Biomed Eng. 2023. PMID: 36943414 Review.
-
Conceptual design of a miniaturized hybrid local actuator for Minimally Invasive Robotic Surgery (MIRS) instruments.Annu Int Conf IEEE Eng Med Biol Soc. 2011;2011:2140-3. doi: 10.1109/IEMBS.2011.6090400. Annu Int Conf IEEE Eng Med Biol Soc. 2011. PMID: 22254761
-
Design of patient-specific concentric tube robots using path planning from 3-D ultrasound.Annu Int Conf IEEE Eng Med Biol Soc. 2017 Jul;2017:165-168. doi: 10.1109/EMBC.2017.8036788. Annu Int Conf IEEE Eng Med Biol Soc. 2017. PMID: 29059836 Free PMC article.
-
A miniaturized vitrectomy system for vitreous and retinal biopsy.Can J Ophthalmol. 1990 Oct;25(6):285-6. Can J Ophthalmol. 1990. PMID: 2249163
-
25-Gauge vitrectomy.Dev Ophthalmol. 2014;54:45-53. doi: 10.1159/000360448. Epub 2014 Aug 26. Dev Ophthalmol. 2014. PMID: 25196751 Review.
Cited by
-
Axially rigid steerable needle with compliant active tip control.PLoS One. 2021 Dec 16;16(12):e0261089. doi: 10.1371/journal.pone.0261089. eCollection 2021. PLoS One. 2021. PMID: 34914777 Free PMC article.
-
Optic Nerve Sheath Fenestration With a Multi-Arm Continuum Robot.IEEE Robot Autom Lett. 2020 Jul;5(3):4874-4881. doi: 10.1109/LRA.2020.3005129. Epub 2020 Jun 25. IEEE Robot Autom Lett. 2020. PMID: 34109274 Free PMC article.
References
-
- Pion B, Valyi ZS, Janssens X, Koch P, Libert J, Caspers L, et al. Vitrectomy in uveitis patients. Bull Soc Belge Ophtalmol. 2013;322:55–61. - PubMed
-
- Davies B. Robotic surgery—a personal view of the past, present and future. Int J Adv Robot Syst. 2015;12:54. doi: 10.5772/60118. - DOI
-
- da Silva V, McGregor T, Rayman R, Luke PP. Telementoring and telesurgery: future or fiction? New York: INTECH Open Access Publisher; 2010.
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
