

Stabilization of a Cart Inverted Pendulum: Improving the Intermittent Feedback Strategy to Match the Limits of Human Performance
- PMID: 31024281
- PMCID: PMC6461063
- DOI: 10.3389/fncom.2019.00016
Stabilization of a Cart Inverted Pendulum: Improving the Intermittent Feedback Strategy to Match the Limits of Human Performance
Abstract
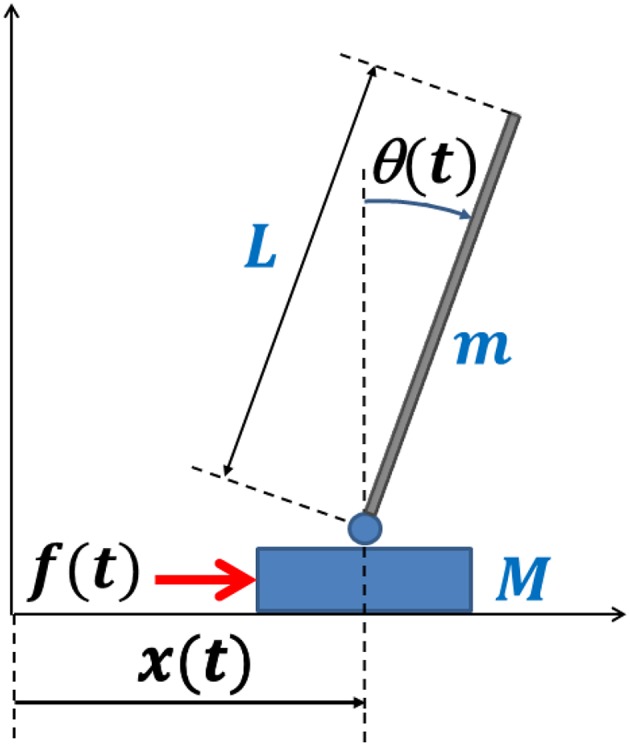
Stabilization of the CIP (Cart Inverted Pendulum) is an analogy to stick balancing on a finger and is an example of unstable tasks that humans face in everyday life. The difficulty of the task grows exponentially with the decrease of the length of the stick and a stick length of 32 cm is considered as a human limit even for well-trained subjects. Moreover, there is a cybernetic limit related to the delay of the multimodal sensory feedback (about 230 ms) that supports a feedback stabilization strategy. We previously demonstrated that an intermittent-feedback control paradigm, originally developed for modeling the stabilization of upright standing, can be applied with success also to the CIP system, but with values of the critical parameters far from the limiting ones (stick length 50 cm and feedback delay 100 ms). The intermittent control paradigm is based on the alternation of on-phases, driven by a proportional/derivative delayed feedback controller, and off-phases, where the feedback is switched off and the motion evolves according to the intrinsic dynamics of the CIP. In its standard formulation, the switching mechanism consists of a simple threshold operator: the feedback control is switched off if the current (delayed) state vector is closer to the stable than to the unstable manifold of the off-phase and is switched on in the opposite case. Although this simple formulation is effective for explaining upright standing as well as CIP balancing, it fails in the most challenging configuration of the CIP. In this work we propose a modification of the standard intermittent control policy that focuses on the explicit selection of switching times and is based on the phase reset of the estimated state vector at each switching time and on the simulation of an approximated internal model of CIP dynamics. We demonstrate, by simulating the modified intermittent control policy, that it can match the limits of human performance, while operating near the edge of instability.
Keywords: Cart Inverted Pendulum; intermittent feedback control; internal model simulation; phase reset; saddle-like instability.
Figures






References
-
- Asai Y., Tasaka Y., Nomura K., Nomura T., Casadio M., Morasso P. (2009). A model of postural control in quiet standing: robust compensation of delay-induced instability using intermittent activation of feedback control. PLoS ONE 4:e6169. 10.1371/annotation/96e08e7f-22f0-445d-8fb3-fe7b071d0a3a - DOI - PMC - PubMed
LinkOut - more resources
Full Text Sources