

A dynamic thermoregulatory material inspired by squid skin
- PMID: 31036806
- PMCID: PMC6488639
- DOI: 10.1038/s41467-019-09589-w
A dynamic thermoregulatory material inspired by squid skin
Abstract
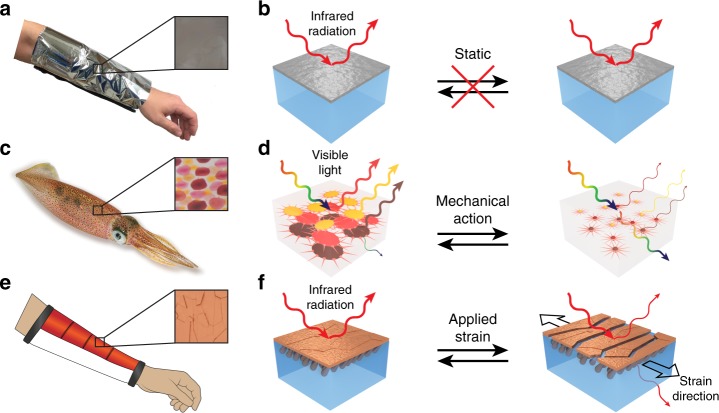
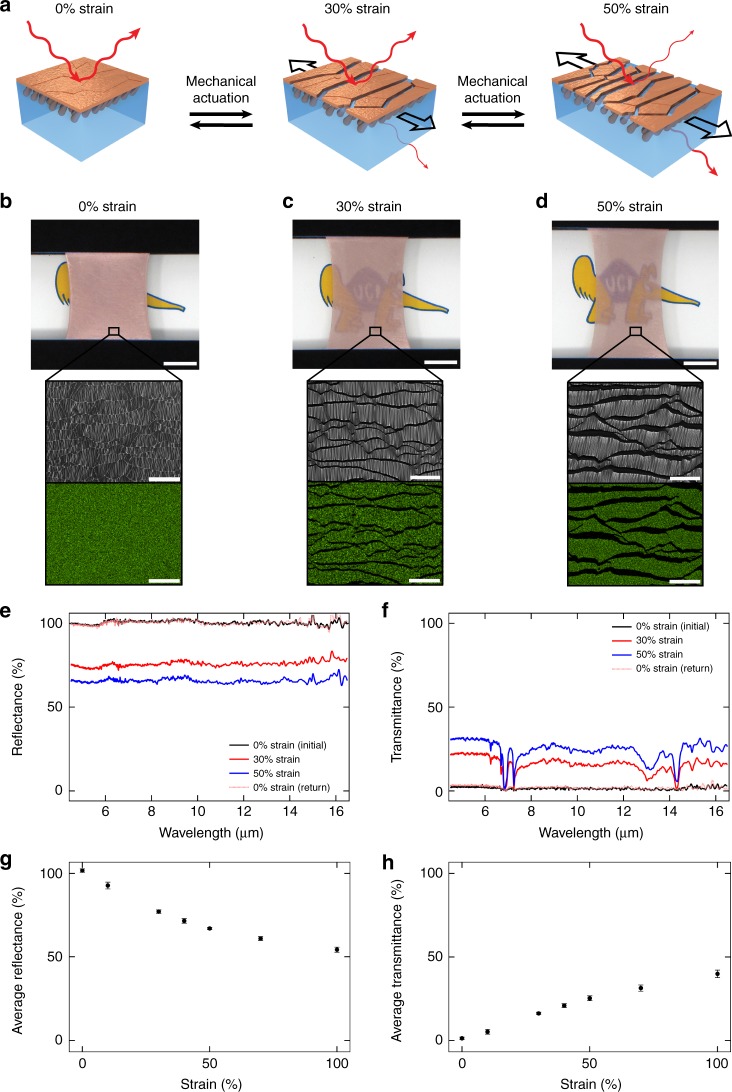
Effective thermal management is critical for the operation of many modern technologies, such as electronic circuits, smart clothing, and building environment control systems. By leveraging the static infrared-reflecting design of the space blanket and drawing inspiration from the dynamic color-changing ability of squid skin, we have developed a composite material with tunable thermoregulatory properties. Our material demonstrates an on/off switching ratio of ~25 for the transmittance, regulates a heat flux of ~36 W/m2 with an estimated mechanical power input of ~3 W/m2, and features a dynamic environmental setpoint temperature window of ~8 °C. Moreover, the composite can manage one fourth of the metabolic heat flux expected for a sedentary individual and can also modulate localized changes in a wearer's body temperature by nearly 10-fold. Due to such functionality and associated figures of merit, our material may substantially reduce building energy consumption upon widespread deployment and adoption.
Conflict of interest statement
E.M.L., S.R.J., M.F., E.M.K., K.L.N., P.P., G.T.S., and A.A.G. are listed as inventors on a provisional U.S. patent application from the University of California, Irvine, which describes the design and working principles of the reported adaptive thermoregulatory materials and systems. The remaining authors declare no competing interests.
Figures


References
-
- Moore AL, Shi L. Emerging challenges and materials for thermal management of electronics. Mater. Today. 2014;17:163–174. doi: 10.1016/j.mattod.2014.04.003. - DOI
-
- Ahlers, M. F. Aircraft Thermal Management (John Wiley & Sons, New York, 2011).
-
- Kikuchi Y, Kanematsu Y, Sato R, Nakagaki T. Distributed cogeneration of power and heat within an energy management strategy for mitigating fossil fuel consumption. J. Ind. Ecol. 2016;20:289–303. doi: 10.1111/jiec.12374. - DOI
-
- Singh SP, Burgess G, Singh J. Performance comparison of thermal insulated packaging boxes, bags and refrigerants for single-parcel shipments. Packag. Technol. Sci. 2008;21:25–35. doi: 10.1002/pts.773. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
