

Moving toward Soft Robotics: A Decade Review of the Design of Hand Exoskeletons
- PMID: 31105239
- PMCID: PMC6352684
- DOI: 10.3390/biomimetics3030017
Moving toward Soft Robotics: A Decade Review of the Design of Hand Exoskeletons
Abstract
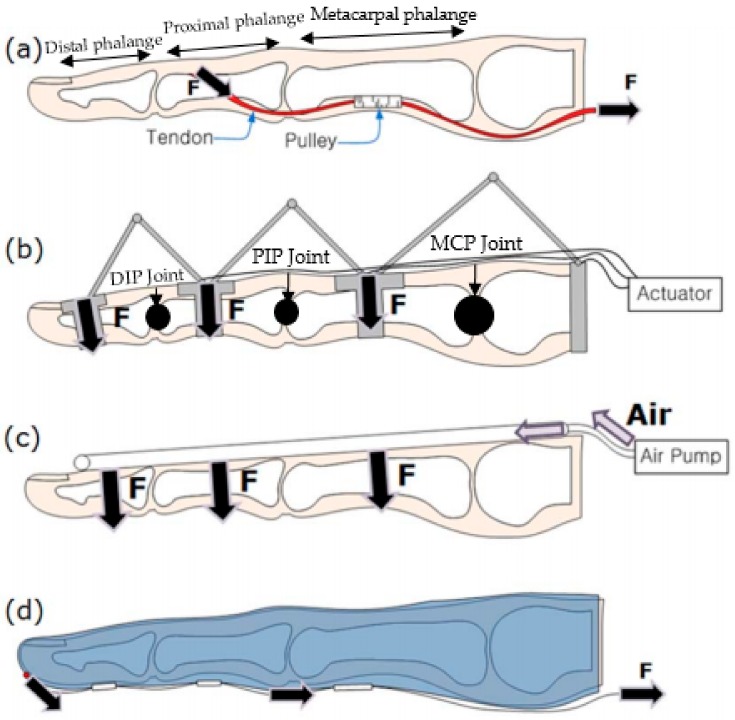
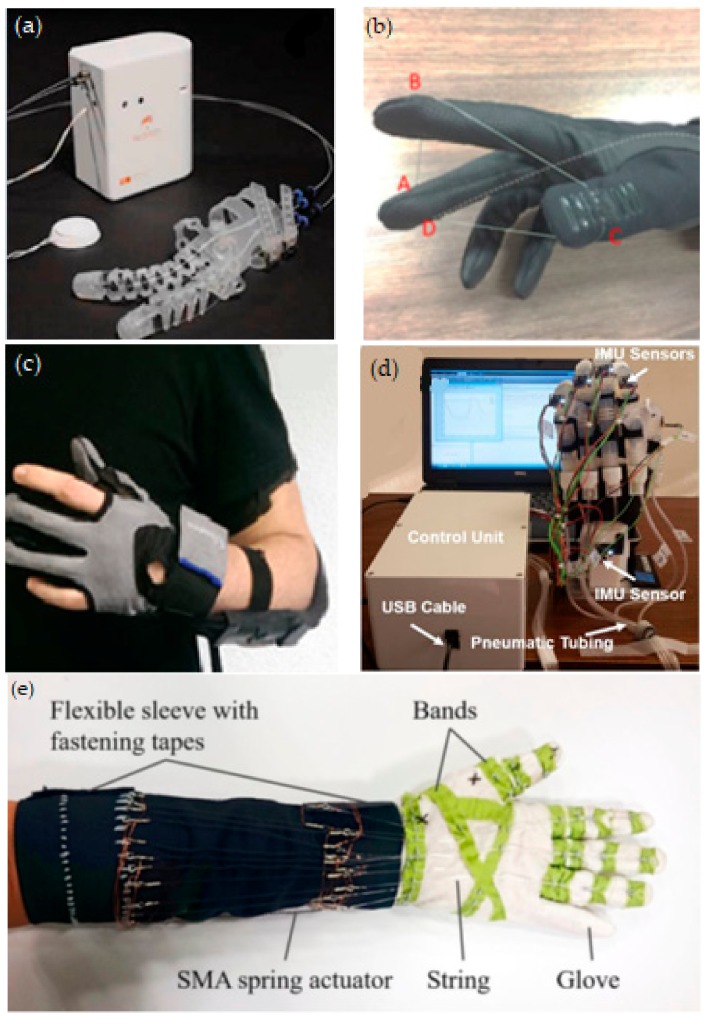
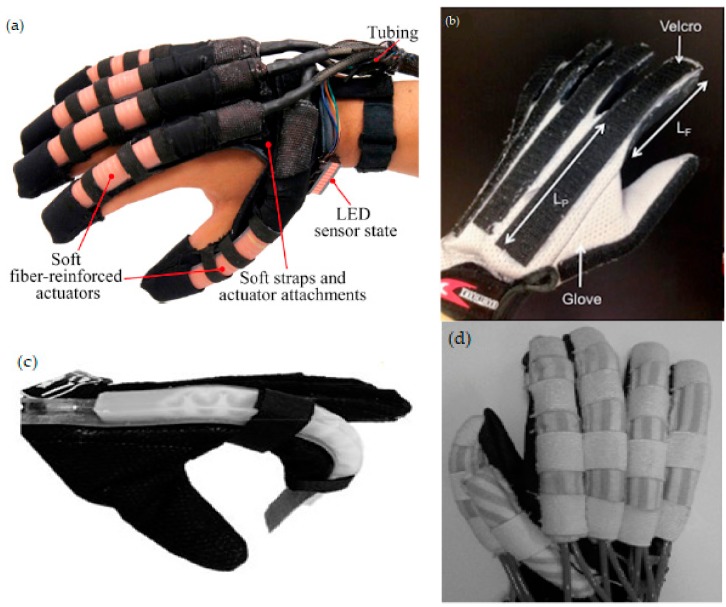
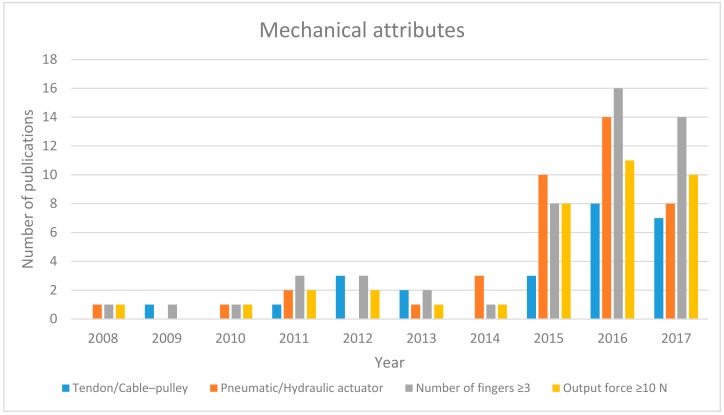
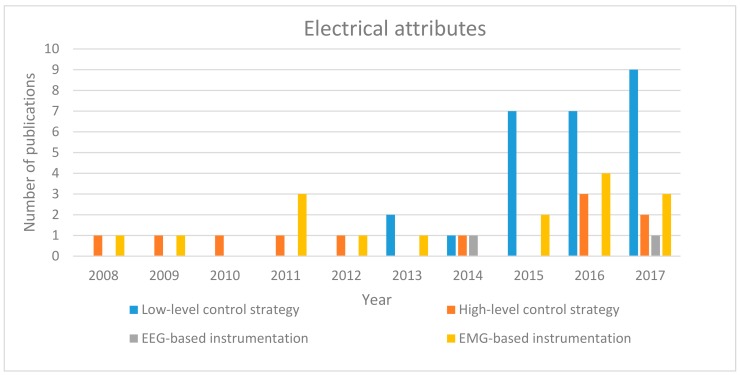
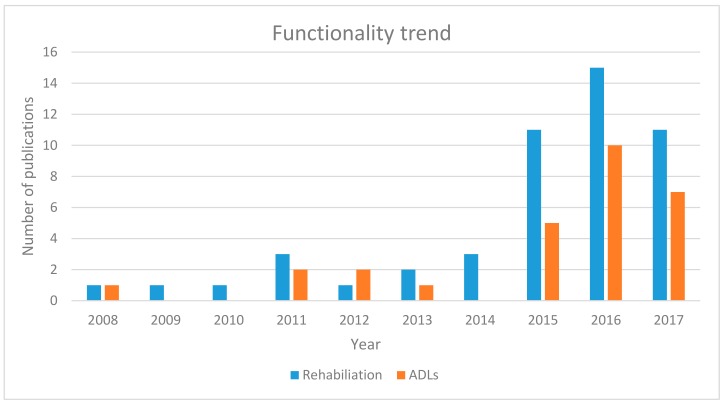
Soft robotics is a branch of robotics that deals with mechatronics and electromechanical systems primarily made of soft materials. This paper presents a summary of a chronicle study of various soft robotic hand exoskeletons, with different electroencephalography (EEG)- and electromyography (EMG)-based instrumentations and controls, for rehabilitation and assistance in activities of daily living. A total of 45 soft robotic hand exoskeletons are reviewed. The study follows two methodological frameworks: a systematic review and a chronological review of the exoskeletons. The first approach summarizes the designs of different soft robotic hand exoskeletons based on their mechanical, electrical and functional attributes, including the degree of freedom, number of fingers, force transmission, actuation mode and control strategy. The second approach discusses the technological trend of soft robotic hand exoskeletons in the past decade. The timeline analysis demonstrates the transformation of the exoskeletons from rigid ferrous materials to soft elastomeric materials. It uncovers recent research, development and integration of their mechanical and electrical components. It also approximates the future of the soft robotic hand exoskeletons and some of their crucial design attributes.
Keywords: activities of daily living; hand exoskeletons; rehabilitation; soft robotics; systematic and chronological review.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
Similar articles
-
Characterisation and evaluation of soft elastomeric actuators for hand assistive and rehabilitation applications.J Med Eng Technol. 2016;40(4):199-209. doi: 10.3109/03091902.2016.1161853. Epub 2016 Mar 23. J Med Eng Technol. 2016. PMID: 27007297
-
Myoelectric Control in Rehabilitative and Assistive Soft Exoskeletons: A Comprehensive Review of Trends, Challenges, and Integration with Soft Robotic Devices.Biomimetics (Basel). 2025 Apr 1;10(4):214. doi: 10.3390/biomimetics10040214. Biomimetics (Basel). 2025. PMID: 40277613 Free PMC article. Review.
-
The-state-of-the-art of soft robotics to assist mobility: a review of physiotherapist and patient identified limitations of current lower-limb exoskeletons and the potential soft-robotic solutions.J Neuroeng Rehabil. 2023 Jan 30;20(1):18. doi: 10.1186/s12984-022-01122-3. J Neuroeng Rehabil. 2023. PMID: 36717869 Free PMC article. Review.
-
A review of lower extremity assistive robotic exoskeletons in rehabilitation therapy.Crit Rev Biomed Eng. 2013;41(4-5):343-63. doi: 10.1615/critrevbiomedeng.2014010453. Crit Rev Biomed Eng. 2013. PMID: 24941413 Review.
-
Design and Preliminary Feasibility Study of a Soft Robotic Glove for Hand Function Assistance in Stroke Survivors.Front Neurosci. 2017 Oct 9;11:547. doi: 10.3389/fnins.2017.00547. eCollection 2017. Front Neurosci. 2017. PMID: 29062267 Free PMC article.
Cited by
-
Assessment of the Mechanical Support Characteristics of a Light and Wearable Robotic Exoskeleton Prototype Applied to Upper Limb Rehabilitation.Sensors (Basel). 2022 May 25;22(11):3999. doi: 10.3390/s22113999. Sensors (Basel). 2022. PMID: 35684618 Free PMC article.
-
3D-Printed Soft Pneumatic Robotic Digit Based on Parametric Kinematic Model for Finger Action Mimicking.Polymers (Basel). 2022 Jul 7;14(14):2786. doi: 10.3390/polym14142786. Polymers (Basel). 2022. PMID: 35890561 Free PMC article.
-
Finger Kinematics during Human Hand Grip and Release.Biomimetics (Basel). 2023 Jun 8;8(2):244. doi: 10.3390/biomimetics8020244. Biomimetics (Basel). 2023. PMID: 37366839 Free PMC article.
-
Design and Prototyping of an Underactuated Hand Exoskeleton With Fingers Coupled by a Gear-Based Differential.Front Robot AI. 2022 Mar 29;9:862340. doi: 10.3389/frobt.2022.862340. eCollection 2022. Front Robot AI. 2022. PMID: 35425814 Free PMC article.
-
A functional assembly framework based on implementable neurobionic material.Clin Transl Med. 2021 Jan;11(1):e277. doi: 10.1002/ctm2.277. Clin Transl Med. 2021. PMID: 33463062 Free PMC article.
References
-
- Nurzaman S.G., Iida F., Laschi C., Ishiguro A., Wood R. Soft robotics—TC spotlight. IEEE Robot. Autom. Mag. 2013;20:24–95.
Publication types
LinkOut - more resources
Full Text Sources
Miscellaneous
