

Biomechanics in Soft Mechanical Sensing: From Natural Case Studies to the Artificial World
- PMID: 31105254
- PMCID: PMC6352697
- DOI: 10.3390/biomimetics3040032
Biomechanics in Soft Mechanical Sensing: From Natural Case Studies to the Artificial World
Abstract
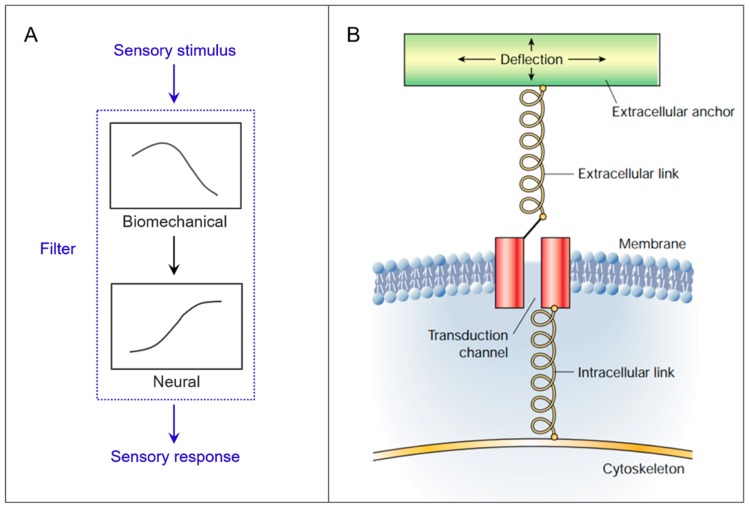
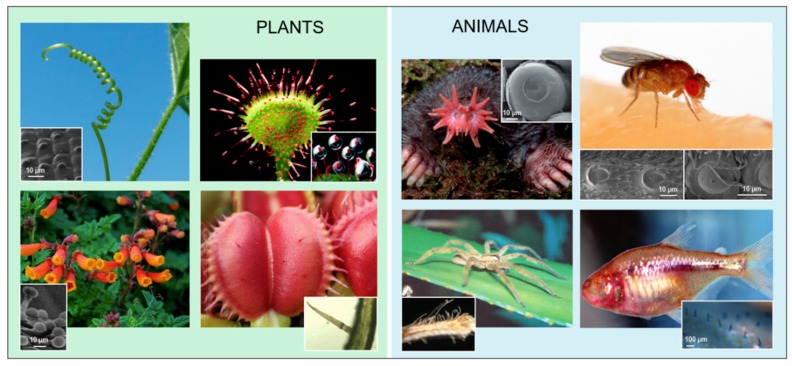
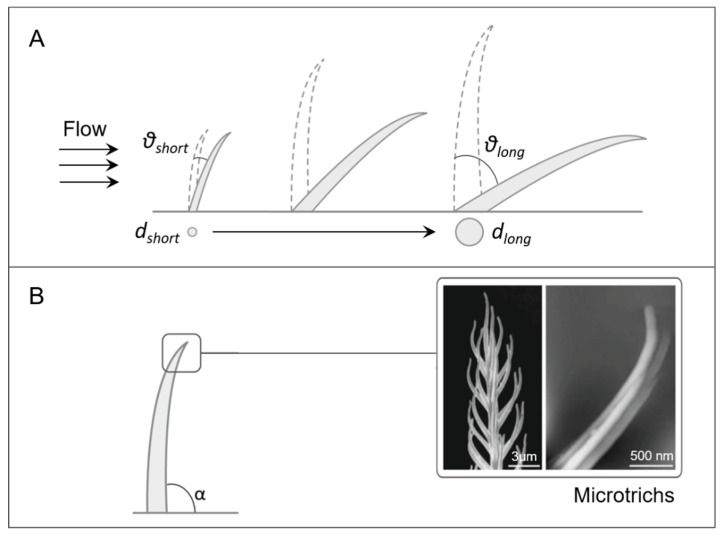
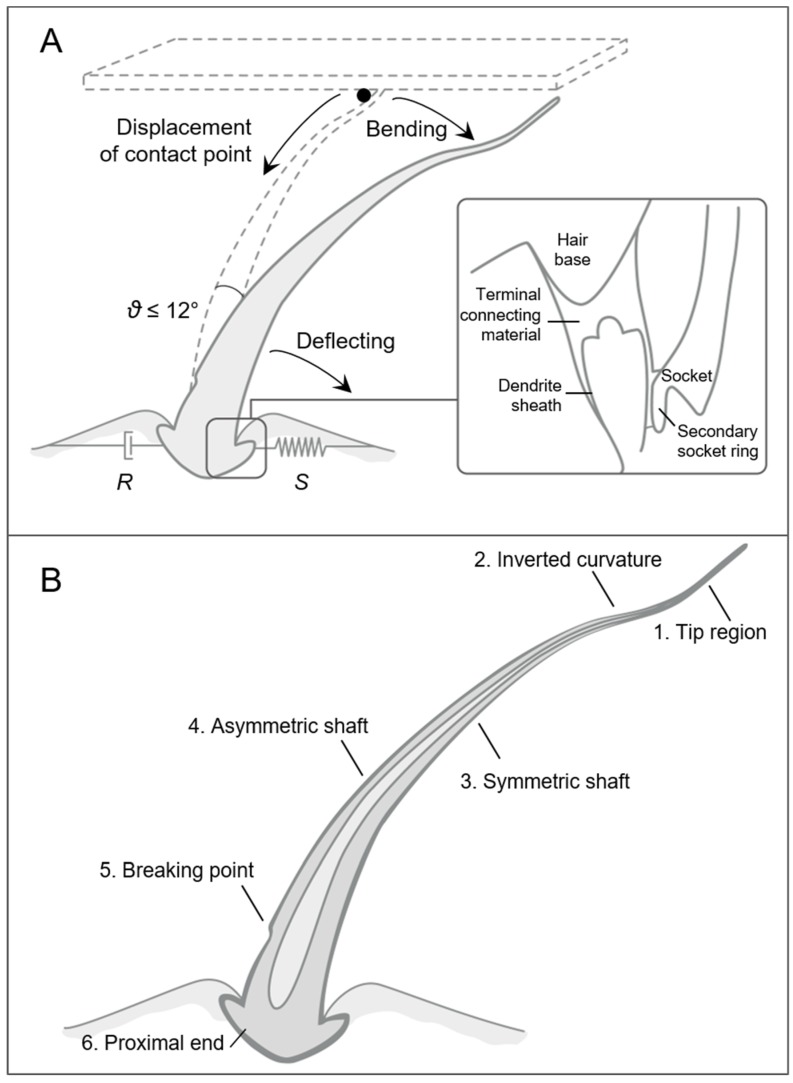
Living beings use mechanical interaction with the environment to gather essential cues for implementing necessary movements and actions. This process is mediated by biomechanics, primarily of the sensory structures, meaning that, at first, mechanical stimuli are morphologically computed. In the present paper, we select and review cases of specialized sensory organs for mechanical sensing-from both the animal and plant kingdoms-that distribute their intelligence in both structure and materials. A focus is set on biomechanical aspects, such as morphology and material characteristics of the selected sensory organs, and on how their sensing function is affected by them in natural environments. In this route, examples of artificial sensors that implement these principles are provided, and/or ways in which they can be translated artificially are suggested. Following a biomimetic approach, our aim is to make a step towards creating a toolbox with general tailoring principles, based on mechanical aspects tuned repeatedly in nature, such as orientation, shape, distribution, materials, and micromechanics. These should be used for a future methodical design of novel soft sensing systems for soft robotics.
Keywords: bioinspired sensing; biomechanics; biomimetics; flow sensing; mechanical sensing; mechanoreceptor; morphological computation; soft robotics; soft sensors; tactile sensing.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
Similar articles
-
Materials, Structures, and Functions for Flexible and Stretchable Biomimetic Sensors.Acc Chem Res. 2019 Feb 19;52(2):288-296. doi: 10.1021/acs.accounts.8b00497. Epub 2019 Jan 17. Acc Chem Res. 2019. PMID: 30653299 Review.
-
How the Environment Shapes Tactile Sensing: Understanding the Relationship Between Tactile Filters and Surrounding Environment.Front Robot AI. 2022 Jul 11;9:930405. doi: 10.3389/frobt.2022.930405. eCollection 2022. Front Robot AI. 2022. PMID: 35899076 Free PMC article.
-
The TacTip Family: Soft Optical Tactile Sensors with 3D-Printed Biomimetic Morphologies.Soft Robot. 2018 Apr;5(2):216-227. doi: 10.1089/soro.2017.0052. Epub 2018 Jan 3. Soft Robot. 2018. PMID: 29297773 Free PMC article.
-
Artificial Venus Flytraps: A Research Review and Outlook on Their Importance for Novel Bioinspired Materials Systems.Front Robot AI. 2020 Jul 8;7:75. doi: 10.3389/frobt.2020.00075. eCollection 2020. Front Robot AI. 2020. PMID: 33501242 Free PMC article. Review.
-
Programmable Morphing Hydrogels for Soft Actuators and Robots: From Structure Designs to Active Functions.Acc Chem Res. 2022 Jun 7;55(11):1533-1545. doi: 10.1021/acs.accounts.2c00046. Epub 2022 Apr 12. Acc Chem Res. 2022. PMID: 35413187
Cited by
-
Mechanosensory Hairs and Hair-like Structures in the Animal Kingdom: Specializations and Shared Functions Serve to Inspire Technology Applications.Sensors (Basel). 2021 Sep 24;21(19):6375. doi: 10.3390/s21196375. Sensors (Basel). 2021. PMID: 34640694 Free PMC article. Review.
-
Soft Robotics.Biomimetics (Basel). 2019 Mar 12;4(1):22. doi: 10.3390/biomimetics4010022. Biomimetics (Basel). 2019. PMID: 31105207 Free PMC article.
-
Wake Detection and Positioning for Autonomous Underwater Vehicles Based on Cilium-Inspired Wake Sensor.Sensors (Basel). 2024 Dec 25;25(1):41. doi: 10.3390/s25010041. Sensors (Basel). 2024. PMID: 39796840 Free PMC article.
-
Mechanosensor for Proprioception Inspired by Ultrasensitive Trigger Hairs of Venus Flytrap.Cyborg Bionic Syst. 2024 Jan 24;5:0065. doi: 10.34133/cbsystems.0065. eCollection 2024. Cyborg Bionic Syst. 2024. PMID: 38268766 Free PMC article.
-
Optical Flow Sensor with Fluorescent-Conjugated Hyperelastic Pillar: A Biomimetic Approach.Biomimetics (Basel). 2024 Nov 22;9(12):721. doi: 10.3390/biomimetics9120721. Biomimetics (Basel). 2024. PMID: 39727725 Free PMC article.
References
Publication types
LinkOut - more resources
Full Text Sources
