

doi: 10.1146/annurev-control-060117-105206.
Internal Models in Biological Control
Affiliations
- PMID: 31106294
- PMCID: PMC6520231
- DOI: 10.1146/annurev-control-060117-105206
Item in Clipboard
Internal Models in Biological Control
Annu Rev Control Robot Auton Syst.
.
Abstract
Rationality principles such as optimal feedback control and Bayesian inference underpin a probabilistic framework that has accounted for a range of empirical phenomena in biological sensorimotor control. To facilitate the optimization of flexible and robust behaviors consistent with these theories, the ability to construct internal models of the motor system and environmental dynamics can be crucial. In the context of this theoretic formalism, we review the computational roles played by such internal models and the neural and behavioral evidence for their implementation in the brain.
Figures
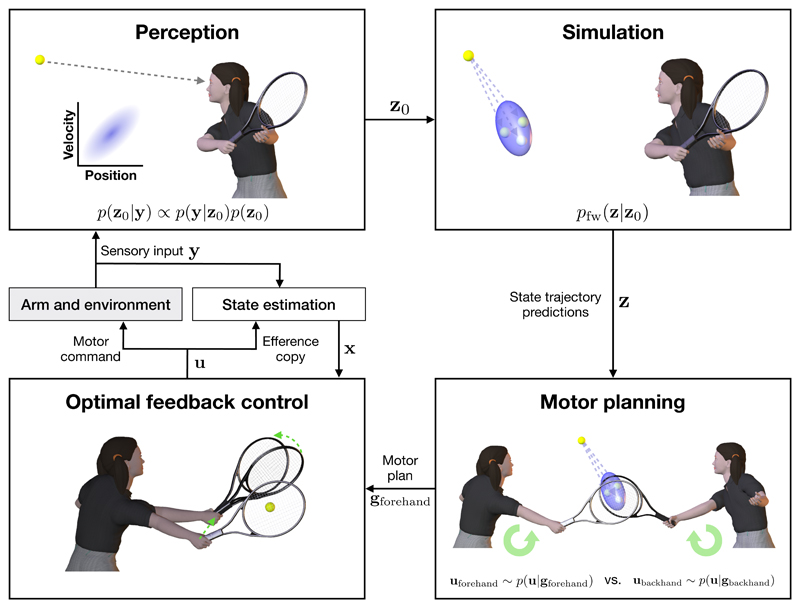
Perception. Sensory input y is used to estimate the ball’s state z0 which is uncertain due to noise along the sensory pathway and the inability to directly observe the full state of the ball (e.g. its spin and velocity). Bayes rule is used to calculate the posterior (an example of a posterior over one component of position and velocity shown in inset). Simulation. An internal dynamical model pfw simulates the forward trajectory z of the ball. At short timescales, this internal modeling is necessary to overcome delays in sensory processing, while at longer timescales, the predictive distribution pfw(z|z0) of the ball’s trajectory can be used for planning. Motor planning. Internal simulation of the ball’s trajectory along with prospective movements are evaluated in order to generate an action plan. The player may have to decide between re-orienting their body in order to play a forehand or backhand. Optimal feedback control. Once a motor plan has been specified, motor commands u are generated by an optimal feedback controller which uses a state estimator to combine sensory feedback and forward sensory predictions (based on an efference copy of the motor command) in order to correct motor errors online in task-relevant dimensions (green arrows).
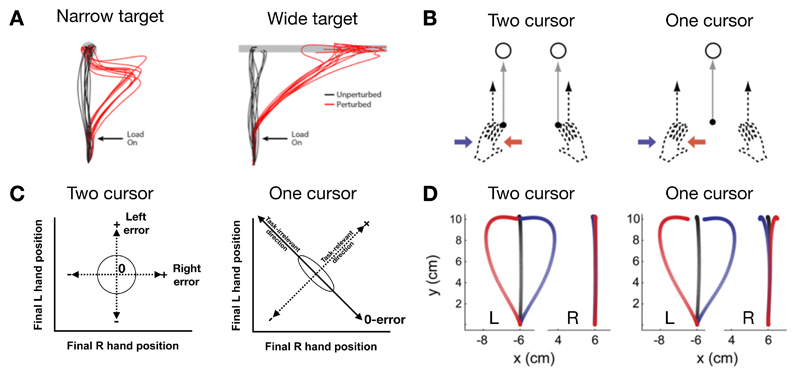
A. Unperturbed movements (black traces show individual hand movement paths) to narrow or wide targets tend to be straight and to move to the closest point on the target. Hand paths during the application of mechanical loads (red traces in response to a force pulse that pushes the hand to the right) delivered immediately after movement onset, which disrupt the execution of the planned movement, obey the principle of minimum intervention. That is, for a narrow target (left), the hand paths correct to reach the target whereas, for a wide target (right), there is no correction and the hand just reaches to another point on the target. B. Participants make reaching movements to targets. In a two-cursor condition, each hand moves its own cursor (black dots) to a separate target. In a one-cursor condition, the cursor is displayed at the average location of the two hands and participants reach with both hands to move this common cursor to a single target. During the movement, the left hand could be perturbed with a leftward (red) or rightward (blue) force field or remain unperturbed (black). C. When each hand controls its own cursor there is only one combination of final hand positions for which there is no error (center of circle). Optimal feedback control predicts that there will be no correlation between the endpoint positions (black circle shows a schematic distribution of errors). When the two hands control the position of a single cursor, there are many combinations of final hand positions which give zero error (black diagonal line; task-irrelevant dimension). Optimal control predicts correction in one hand to deviations in the other leading to negative correlations between the final locations of the two hands, so that if one hand is too far to the left the other compensates by moving to the right (black ellipse). D. Movement trajectories shown for the left and right hand for perturbations shown in B (one-cursor condition). The response of the right hand to perturbations of the left hand shows compensation only for the one-cursor condition in accord with the predictions of optimal feedback control. In addition, negative correlations in final hand positions can be seen in unperturbed movements for the one-cursor but not two-cursor condition (not shown). Modified with permission from [52] (A) and [53] (B-D).
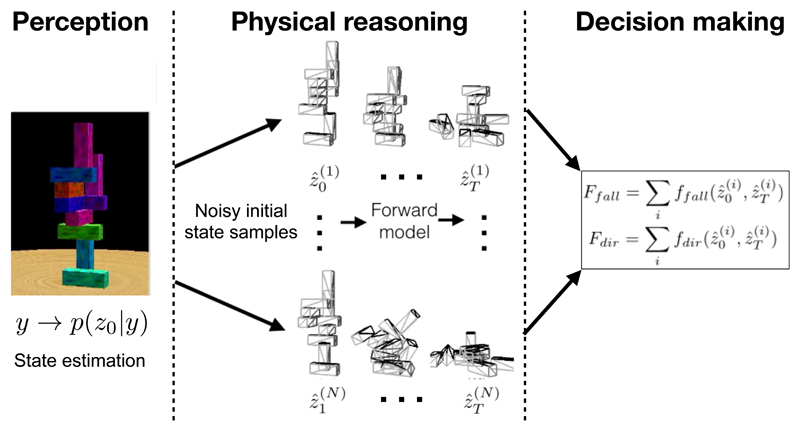
Participants must decide if a complex scene of blocks will fall and if so the direction of the fall. A model of their performance combines perception, physical reasoning, and decision-making. Left. A Bayesian model of perception uses the sensory input y to estimate participant’s belief p(z0|y) regarding environment states such as the position, geometry, and mass of the blocks. Middle. Stochastic simulations based on samples from the posterior are performed using a noisy and approximate model of the physical properties of the world. The simulations use a forward model to sample multiple (superscripts) state trajectories over time (subscripts)
Right. The outputs of this “intuitive physics engine” can then be processed to make judgments, such as the probability that the tower block will fall (Ffall) and the direction of the fall (Fdir). Experiments have indicated that humans are adept at making rapid judgments regarding the dynamics of such complex scenes and these judgments are consistent with predictions generated using this model which includes approximate Bayesian methods combined with internal forward models. Modified with permission from [123].
Similar articles
-
Representations of uncertainty in sensorimotor control.Curr Opin Neurobiol. 2011 Aug;21(4):629-35. doi: 10.1016/j.conb.2011.05.026. Curr Opin Neurobiol. 2011. PMID: 21689923 Review.
-
Bayesian causal inference: A unifying neuroscience theory.Neurosci Biobehav Rev. 2022 Jun;137:104619. doi: 10.1016/j.neubiorev.2022.104619. Epub 2022 Mar 21. Neurosci Biobehav Rev. 2022. PMID: 35331819 Review.
-
The visual system's internal model of the world.Proc IEEE Inst Electr Electron Eng. 2015 Aug;103(8):1359-1378. doi: 10.1109/JPROC.2015.2434601. Epub 2015 Jul 6. Proc IEEE Inst Electr Electron Eng. 2015. PMID: 26566294 Free PMC article.
-
Model-Free Robust Optimal Feedback Mechanisms of Biological Motor Control.Neural Comput. 2020 Mar;32(3):562-595. doi: 10.1162/neco_a_01260. Epub 2020 Jan 17. Neural Comput. 2020. PMID: 31951794
-
Neurocomputational Mechanisms of Sense of Agency: Literature Review for Integrating Predictive Coding and Adaptive Control in Human-Machine Interfaces.Brain Sci. 2025 Apr 14;15(4):396. doi: 10.3390/brainsci15040396. Brain Sci. 2025. PMID: 40309878 Free PMC article. Review.
Cited by
-
Aging exerts a limited influence on the perception of self-generated and externally generated touch.J Neurophysiol. 2023 Oct 1;130(4):871-882. doi: 10.1152/jn.00145.2023. Epub 2023 Aug 23. J Neurophysiol. 2023. PMID: 37609705 Free PMC article.
-
Allostasis as a core feature of hierarchical gradients in the human brain.Netw Neurosci. 2022 Oct 1;6(4):1010-1031. doi: 10.1162/netn_a_00240. eCollection 2022. Netw Neurosci. 2022. PMID: 38800458 Free PMC article.
-
Parieto-Occipital Electrocortical Dynamics during Real-World Table Tennis.eNeuro. 2023 Apr 27;10(4):ENEURO.0463-22.2023. doi: 10.1523/ENEURO.0463-22.2023. Print 2023 Apr. eNeuro. 2023. PMID: 37037603 Free PMC article.
-
Inferring control objectives in a virtual balancing task in humans and monkeys.Elife. 2024 May 13;12:RP88514. doi: 10.7554/eLife.88514. Elife. 2024. PMID: 38738986 Free PMC article.
-
Action prediction in psychosis.Schizophrenia (Heidelb). 2024 Jan 10;10(1):8. doi: 10.1038/s41537-023-00429-x. Schizophrenia (Heidelb). 2024. PMID: 38200038 Free PMC article.
References
-
- Conant Roger, Ashby Ross. Every good regulator of a system must be a model of that system. International Journal of Systems Science. 1970;1(2):89–97.
-
- Miall RC, Wolpert DM. Forward models for physiological motor control. Neural Networks. 1996;9:1265–1279. - PubMed
-
- Kawato M. Internal models for motor control and trajectory planning. Current Opinion in Neurobiology. 1999;9(6):718–727. - PubMed
-
- Craik Kenneth James Williams. The Nature of Explanation. Vol. 445 Cambridge University Press; 1943.
-
- Popper Karl. The Poverty of Historicism. The Beacon Press; Boston: 1957.
Grants and funding
LinkOut - more resources
Full Text Sources