

A photometric stereo-based 3D imaging system using computer vision and deep learning for tracking plant growth
- PMID: 31127811
- PMCID: PMC6534809
- DOI: 10.1093/gigascience/giz056
A photometric stereo-based 3D imaging system using computer vision and deep learning for tracking plant growth
Abstract
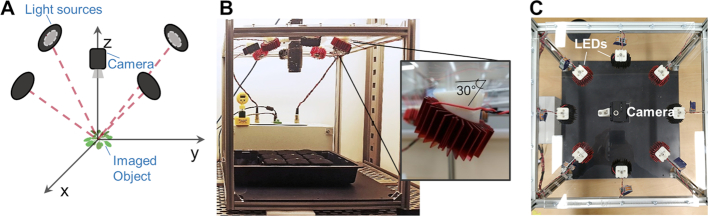
Background: Tracking and predicting the growth performance of plants in different environments is critical for predicting the impact of global climate change. Automated approaches for image capture and analysis have allowed for substantial increases in the throughput of quantitative growth trait measurements compared with manual assessments. Recent work has focused on adopting computer vision and machine learning approaches to improve the accuracy of automated plant phenotyping. Here we present PS-Plant, a low-cost and portable 3D plant phenotyping platform based on an imaging technique novel to plant phenotyping called photometric stereo (PS).
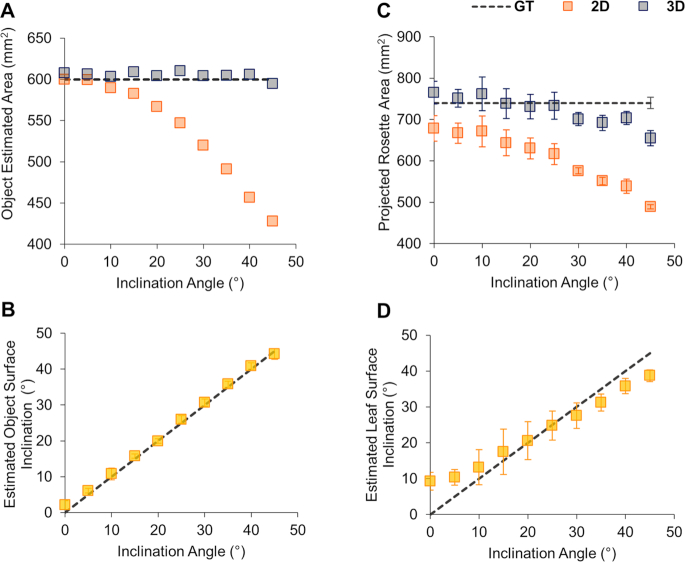
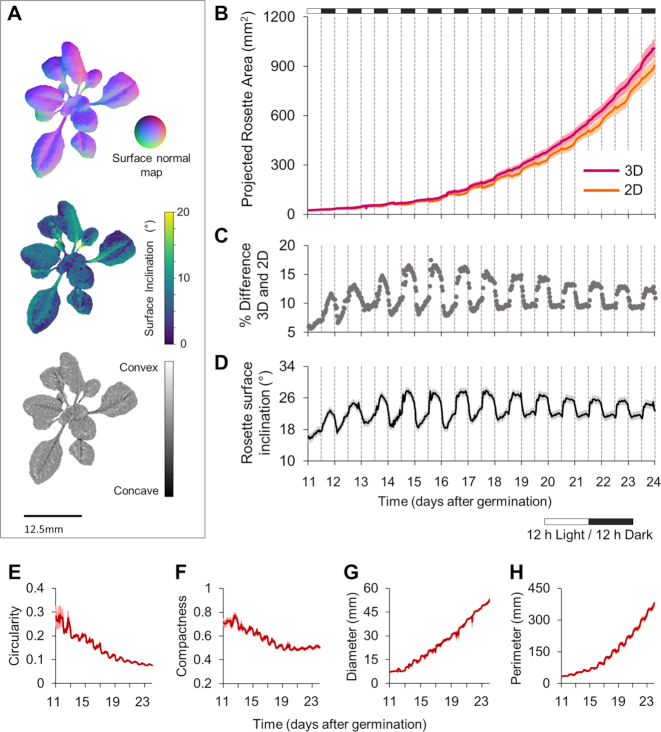
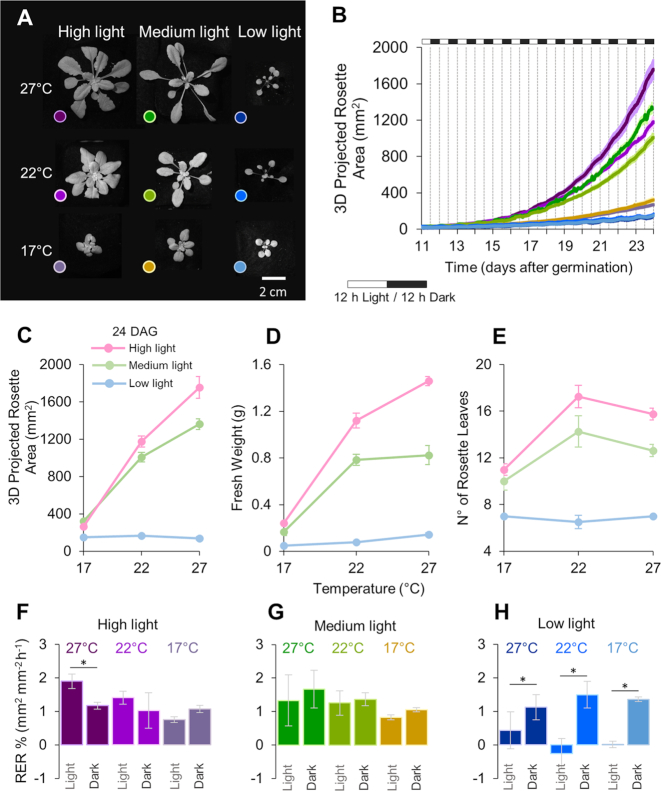
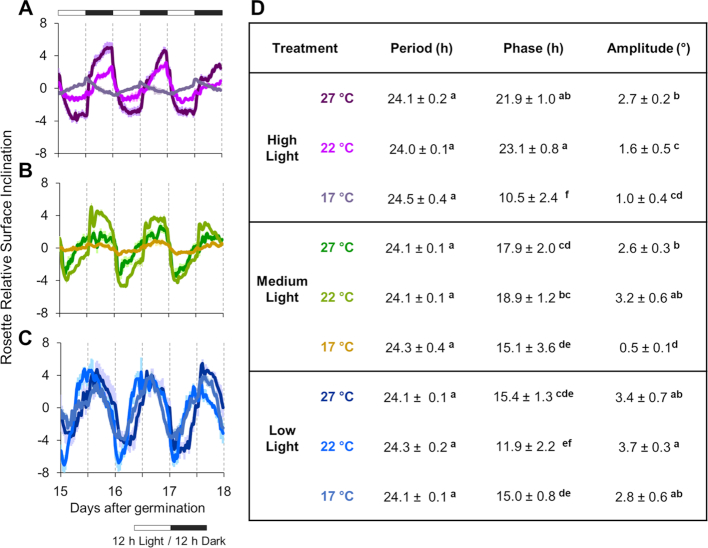
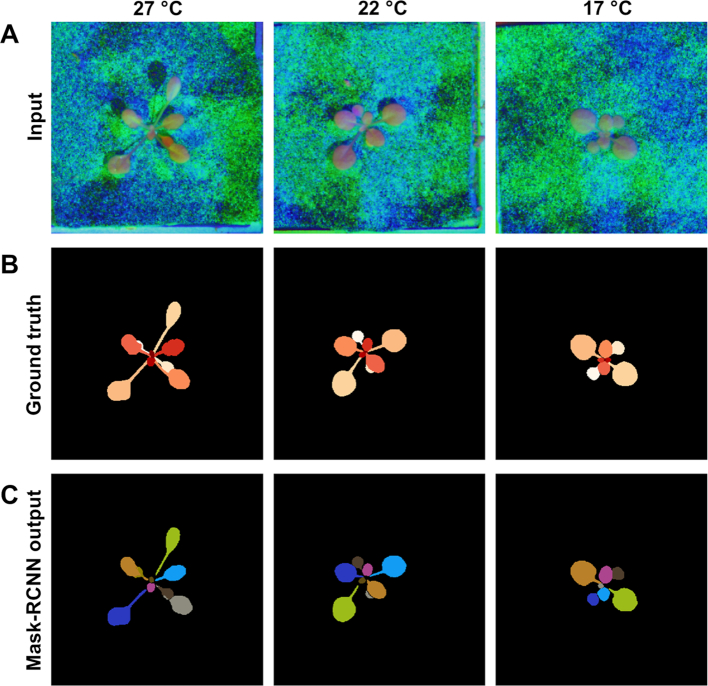
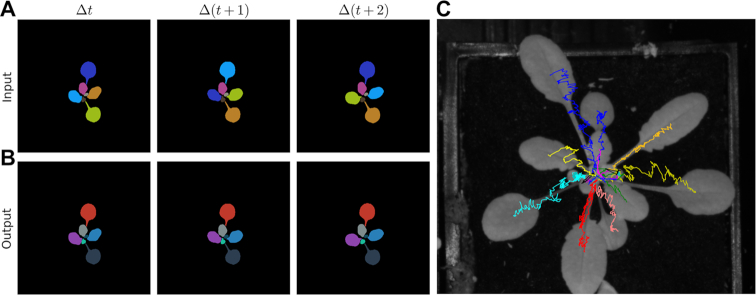
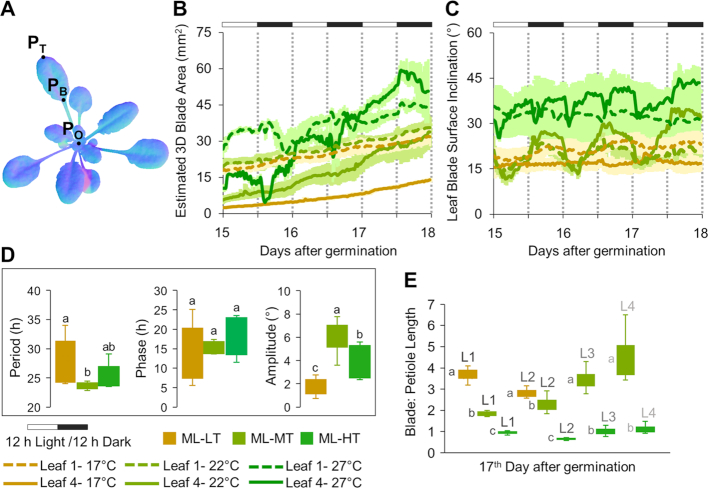
Results: We calibrated PS-Plant to track the model plant Arabidopsis thaliana throughout the day-night (diel) cycle and investigated growth architecture under a variety of conditions to illustrate the dramatic effect of the environment on plant phenotype. We developed bespoke computer vision algorithms and assessed available deep neural network architectures to automate the segmentation of rosettes and individual leaves, and extract basic and more advanced traits from PS-derived data, including the tracking of 3D plant growth and diel leaf hyponastic movement. Furthermore, we have produced the first PS training data set, which includes 221 manually annotated Arabidopsis rosettes that were used for training and data analysis (1,768 images in total). A full protocol is provided, including all software components and an additional test data set.
Conclusions: PS-Plant is a powerful new phenotyping tool for plant research that provides robust data at high temporal and spatial resolutions. The system is well-suited for small- and large-scale research and will help to accelerate bridging of the phenotype-to-genotype gap.
Keywords: Arabidopsis thaliana; leaf angle; machine learning; near-infrared LEDs; photomorphogenesis; segmentation; thermomorphogenesis.
© The Author(s) 2019. Published by Oxford University Press.
Figures
Similar articles
-
RootNav 2.0: Deep learning for automatic navigation of complex plant root architectures.Gigascience. 2019 Nov 1;8(11):giz123. doi: 10.1093/gigascience/giz123. Gigascience. 2019. PMID: 31702012 Free PMC article.
-
Machine Vision System for 3D Plant Phenotyping.IEEE/ACM Trans Comput Biol Bioinform. 2019 Nov-Dec;16(6):2009-2022. doi: 10.1109/TCBB.2018.2824814. Epub 2018 Apr 10. IEEE/ACM Trans Comput Biol Bioinform. 2019. PMID: 29993836
-
Phenotiki: an open software and hardware platform for affordable and easy image-based phenotyping of rosette-shaped plants.Plant J. 2017 Apr;90(1):204-216. doi: 10.1111/tpj.13472. Epub 2017 Mar 2. Plant J. 2017. PMID: 28066963
-
Computer vision-based phenotyping for improvement of plant productivity: a machine learning perspective.Gigascience. 2019 Jan 1;8(1):giy153. doi: 10.1093/gigascience/giy153. Gigascience. 2019. PMID: 30520975 Free PMC article. Review.
-
Cutting-edge computational approaches to plant phenotyping.Plant Mol Biol. 2025 Apr 7;115(2):56. doi: 10.1007/s11103-025-01582-w. Plant Mol Biol. 2025. PMID: 40192856 Review.
Cited by
-
3D modeling and reconstruction of plants and trees: A cross-cutting review across computer graphics, vision, and plant phenotyping.Breed Sci. 2022 Mar;72(1):31-47. doi: 10.1270/jsbbs.21074. Epub 2022 Feb 3. Breed Sci. 2022. PMID: 36045890 Free PMC article.
-
Deep Segmentation of Point Clouds of Wheat.Front Plant Sci. 2021 Mar 24;12:608732. doi: 10.3389/fpls.2021.608732. eCollection 2021. Front Plant Sci. 2021. PMID: 33841454 Free PMC article.
-
MVS-Pheno: A Portable and Low-Cost Phenotyping Platform for Maize Shoots Using Multiview Stereo 3D Reconstruction.Plant Phenomics. 2020 Mar 12;2020:1848437. doi: 10.34133/2020/1848437. eCollection 2020. Plant Phenomics. 2020. PMID: 33313542 Free PMC article.
-
All roads lead to growth: imaging-based and biochemical methods to measure plant growth.J Exp Bot. 2020 Jan 1;71(1):11-21. doi: 10.1093/jxb/erz406. J Exp Bot. 2020. PMID: 31613967 Free PMC article.
-
ROSE-X: an annotated data set for evaluation of 3D plant organ segmentation methods.Plant Methods. 2020 Mar 4;16:28. doi: 10.1186/s13007-020-00573-w. eCollection 2020. Plant Methods. 2020. PMID: 32158494 Free PMC article.
References
-
- Meinke H. Agricultural impacts: Europe's diminishing bread basket. Nat Clim Chang. 2014;4:541–2.
-
- Long SP, Marshall-Colon A, Zhu XG. Meeting the global food demand of the future by engineering crop photosynthesis and yield potential. Cell. 2015;161:56–66. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Molecular Biology Databases
Miscellaneous
