

DeepBehavior: A Deep Learning Toolbox for Automated Analysis of Animal and Human Behavior Imaging Data
- PMID: 31133826
- PMCID: PMC6513883
- DOI: 10.3389/fnsys.2019.00020
DeepBehavior: A Deep Learning Toolbox for Automated Analysis of Animal and Human Behavior Imaging Data
Abstract
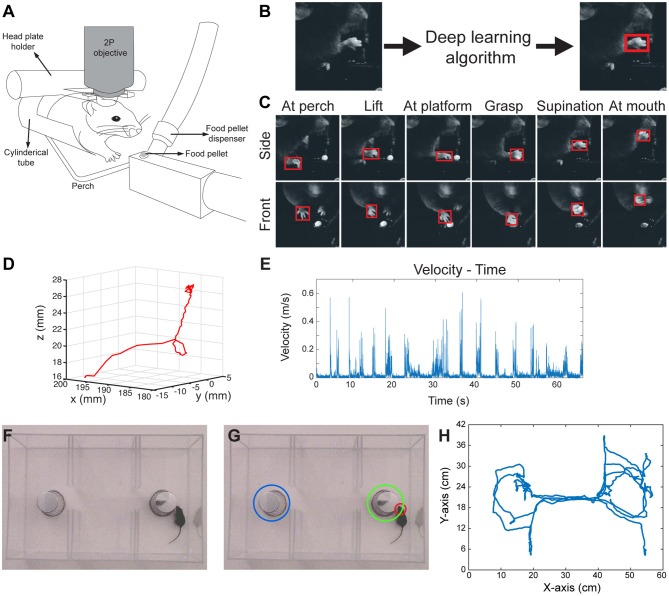
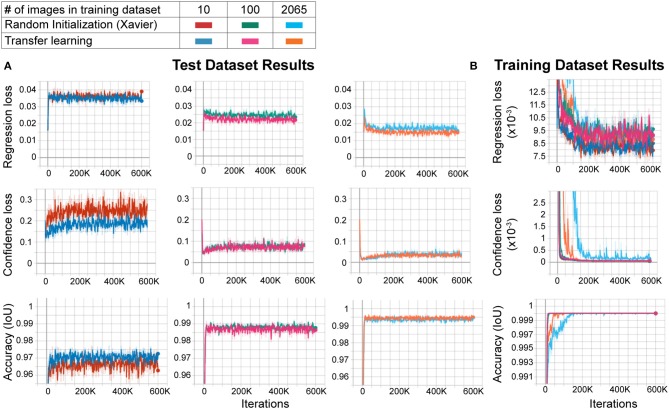
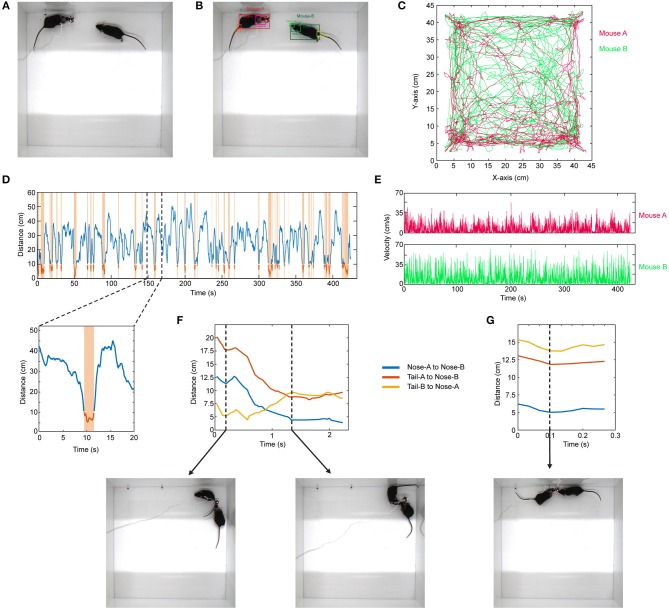
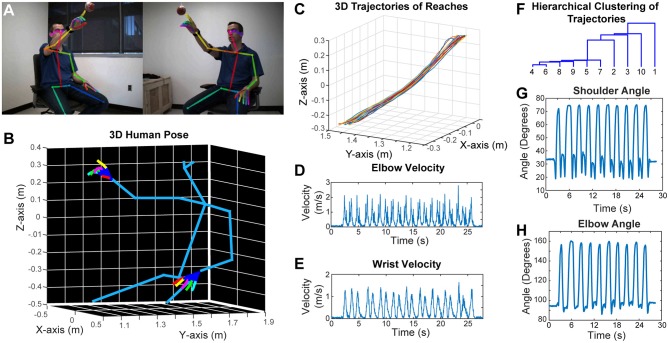
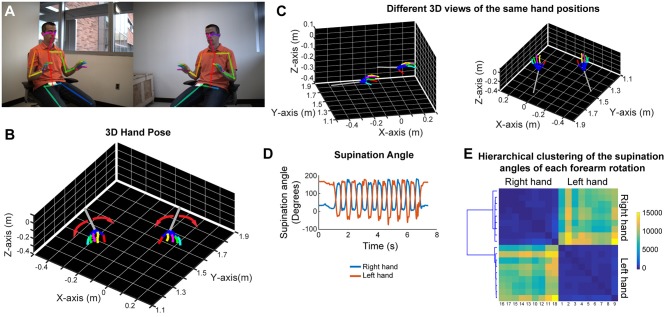
Detailed behavioral analysis is key to understanding the brain-behavior relationship. Here, we present deep learning-based methods for analysis of behavior imaging data in mice and humans. Specifically, we use three different convolutional neural network architectures and five different behavior tasks in mice and humans and provide detailed instructions for rapid implementation of these methods for the neuroscience community. We provide examples of three dimensional (3D) kinematic analysis in the food pellet reaching task in mice, three-chamber test in mice, social interaction test in freely moving mice with simultaneous miniscope calcium imaging, and 3D kinematic analysis of two upper extremity movements in humans (reaching and alternating pronation/supination). We demonstrate that the transfer learning approach accelerates the training of the network when using images from these types of behavior video recordings. We also provide code for post-processing of the data after initial analysis with deep learning. Our methods expand the repertoire of available tools using deep learning for behavior analysis by providing detailed instructions on implementation, applications in several behavior tests, and post-processing methods and annotated code for detailed behavior analysis. Moreover, our methods in human motor behavior can be used in the clinic to assess motor function during recovery after an injury such as stroke.
Keywords: behavior analysis; deep learning; human kinematics; motor behavior; social behavior.
Figures
References
-
- Alt Murphy M., Häger C. K. (2015). Kinematic analysis of the upper extremity after stroke - how far have we reached and what have we grasped? Phys. Ther. Rev. 20, 137–155. 10.1179/1743288X15Y.0000000002 - DOI
-
- Bernhardt J., Hayward K. S., Kwakkel G., Ward N. S., Wolf S. L., Borschmann K., et al. . (2017). Agreed definitions and a shared vision for new standards in stroke recovery research: the stroke recovery and rehabilitation roundtable taskforce. Neurorehabil. Neural. Repair. 31, 793–799. 10.1177/1545968317732668 - DOI - PubMed
-
- Bouguet J. Y. (2015). Camera Calibration Toolbox for Matlab: California Institute of Technology. Available online at: http://www.vision.caltech.edu/bouguetj/calib_doc/