

Evaluation of Gait Phase Detection Delay Compensation Strategies to Control a Gyroscope-Controlled Functional Electrical Stimulation System During Walking
- PMID: 31151183
- PMCID: PMC6603781
- DOI: 10.3390/s19112471
Evaluation of Gait Phase Detection Delay Compensation Strategies to Control a Gyroscope-Controlled Functional Electrical Stimulation System During Walking
Abstract
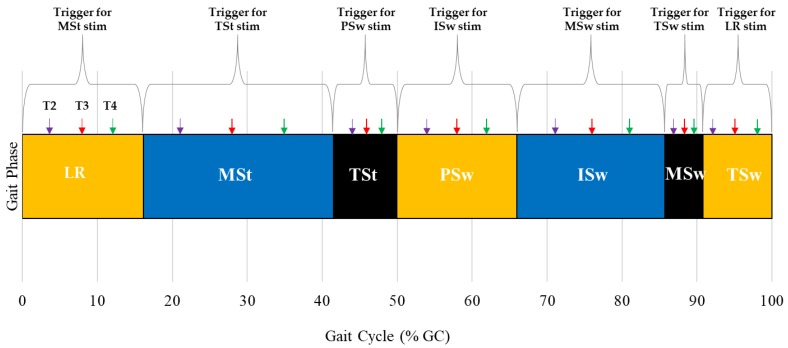
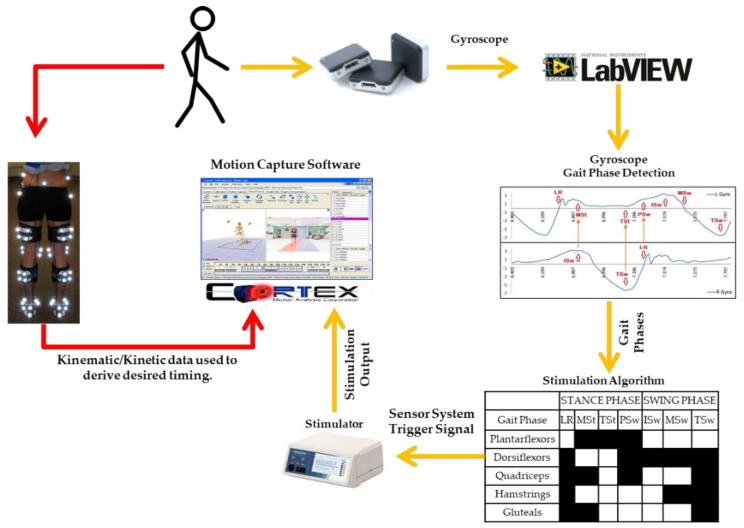
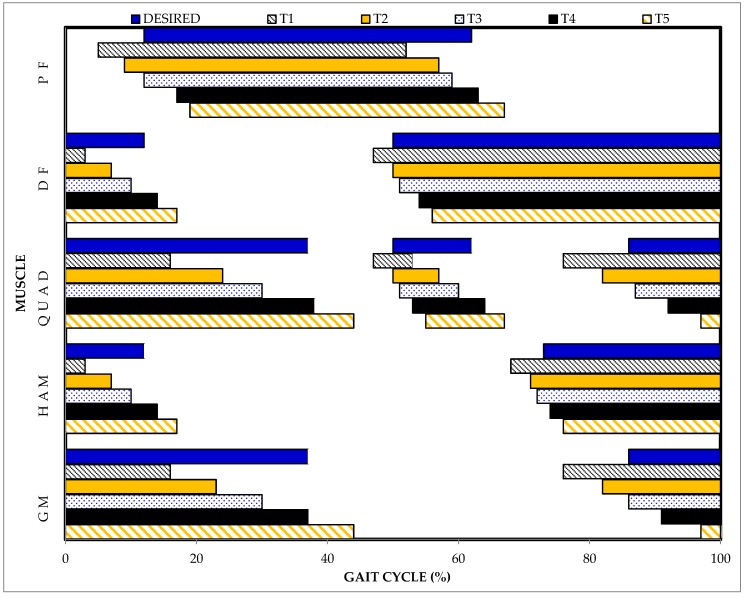
Functional electrical stimulation systems are used as neuroprosthetic devices in rehabilitative interventions such as gait training. Stimulator triggers, implemented to control stimulation delivery, range from open- to closed-loop controllers. Finite-state controllers trigger stimulators when specific conditions are met and utilize preset sequences of stimulation. Wearable sensors provide the necessary input to differentiate gait phases during walking and trigger stimulation. However, gait phase detection is associated with inherent system delays. In this study, five stimulator triggers designed to compensate for gait phase detection delays were tested to determine which trigger most accurately delivered stimulation at the desired times of the gait cycle. Motion capture data were collected on seven typically-developing children while walking on an instrumented treadmill. Participants wore one inertial measurement unit on each ankle and gyroscope data were streamed into the gait phase detection algorithm. Five triggers, based on gait phase detection, were used to simulate stimulation to five muscle groups, bilaterally. For each condition, stimulation signals were collected in the motion capture software via analog channels and compared to the desired timing determined by kinematic and kinetic data. Results illustrate that gait phase detection is a viable finite-state control, and appropriate system delay compensations, on average, reduce stimulation delivery delays by 6.7% of the gait cycle.
Keywords: finite-state control; functional electrical stimulation (FES); gait phase detection (GPD).
Conflict of interest statement
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Figures
References
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
