

A cross-modal feedback scheme for control of prosthetic grasp strength
- PMID: 31186905
- PMCID: PMC6453087
- DOI: 10.1177/2055668316663121
A cross-modal feedback scheme for control of prosthetic grasp strength
Abstract
Introduction: Given the lack of haptic feedback inherent in prosthetic devices, a natural and adaptable feedback scheme must be implemented. While multimodal feedback has proven successful in aiding dexterous performance, it can be mentally tasking on the individual. Conversely, cross-modal schemes relying on sensory substitution have proven to be equally effective in aiding task performance without cognitively burdening the user to the same degree.
Objectives: This experiment investigated the effectiveness of the cross-modal feedback scheme through using audio feedback to represent prosthetic grasping strength during dynamic control of a prosthetic hand.
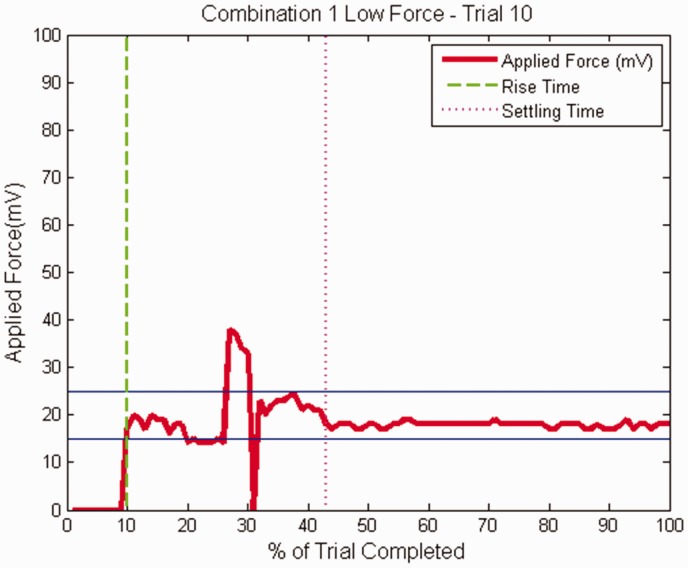
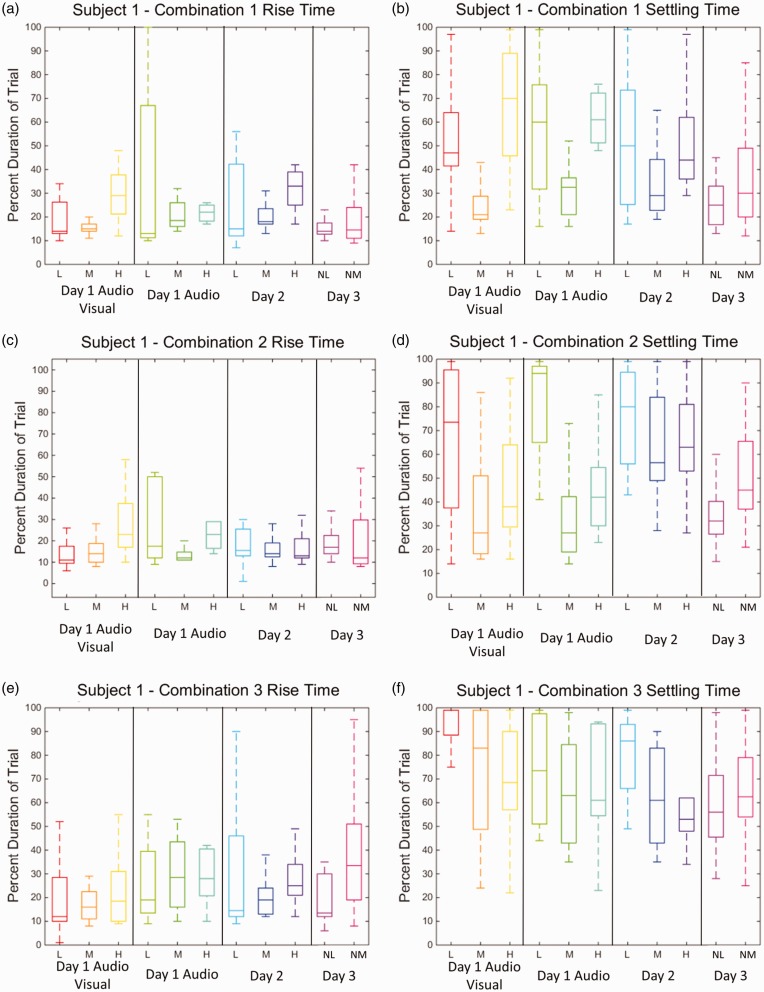
Methods: A total of five individuals participated in two sets of experiments (four subjects in the first, one subject in the second). Participants were asked to control the grasping strength exerted by a prosthetic hand while using real-time audio feedback in order to reach up to three different levels of force within a trial set.
Results: The cross-modal feedback scheme successfully provided users with the robust ability to modulate grasping strength in real-time using only audio feedback.
Conclusion: Audio feedback effectively conveys haptic information to the user of a prosthetic hand. Retention of the training knowledge is evident and can be generalized to perform new (i.e. untrained) tasks.
Keywords: Amputees; limb prosthetics; prosthetic control; sensation simulation/restoration; upper limb prosthetics.
Conflict of interest statement
None declared.
Figures


Similar articles
-
Design and Experimental Evaluation of a Sensorimotor-Inspired Grasping Strategy for Dexterous Prosthetic Hands.IEEE Trans Neural Syst Rehabil Eng. 2023;31:738-748. doi: 10.1109/TNSRE.2022.3231972. Epub 2023 Feb 2. IEEE Trans Neural Syst Rehabil Eng. 2023. PMID: 37015398
-
Improving internal model strength and performance of prosthetic hands using augmented feedback.J Neuroeng Rehabil. 2018 Jul 31;15(1):70. doi: 10.1186/s12984-018-0417-4. J Neuroeng Rehabil. 2018. PMID: 30064477 Free PMC article.
-
A Control Architecture for Grasp Strength Regulation in Myocontrolled Robotic Hands Using Vibrotactile Feedback: Preliminary Results.IEEE Int Conf Rehabil Robot. 2019 Jun;2019:1272-1277. doi: 10.1109/ICORR.2019.8779476. IEEE Int Conf Rehabil Robot. 2019. PMID: 31374804
-
A review of invasive and non-invasive sensory feedback in upper limb prostheses.Expert Rev Med Devices. 2017 Jun;14(6):439-447. doi: 10.1080/17434440.2017.1332989. Expert Rev Med Devices. 2017. PMID: 28532184 Review.
-
Literature Review on Needs of Upper Limb Prosthesis Users.Front Neurosci. 2016 May 12;10:209. doi: 10.3389/fnins.2016.00209. eCollection 2016. Front Neurosci. 2016. PMID: 27242413 Free PMC article. Review.
Cited by
-
The Latest Research Progress on Bionic Artificial Hands: A Systematic Review.Micromachines (Basel). 2024 Jul 8;15(7):891. doi: 10.3390/mi15070891. Micromachines (Basel). 2024. PMID: 39064402 Free PMC article. Review.
References
-
- Biddiss E, Beaton D, Chau T. Consumer design priorities for upper limb prosthetics. Disabil Rehabil Assist Technol 2007; 2: 346–357. - PubMed
-
- Gibson A and Artemiadis P. Object discrimination using optimized multi-frequency auditory cross-modal haptic feedback. In: Engineering in medicine and biology society (EMBC), 2014 36th annual international conference of the IEEE, Chicago, IL, 26–30 August 2014, pp. 6505–6508. IEEE. - PubMed
-
- Dhillon GS, Horch KW. Direct neural sensory feedback and control of a prosthetic arm. IEEE Transactions on Neural Systems and Rehabilitation Engineering 2005; 13: 468–472. - PubMed
LinkOut - more resources
Full Text Sources
