

Development of KIINCE: A kinetic feedback-based robotic environment for study of neuromuscular coordination and rehabilitation of human standing and walking
- PMID: 31191950
- PMCID: PMC6453043
- DOI: 10.1177/2055668318793585
Development of KIINCE: A kinetic feedback-based robotic environment for study of neuromuscular coordination and rehabilitation of human standing and walking
Abstract
Introduction: The objective of this article is to introduce the robotic platform KIINCE and its emphasis on the potential of kinetic objectives for studying and training human walking and standing. The device is motivated by the need to characterize and train lower limb muscle coordination to address balance deficits in impaired walking and standing.
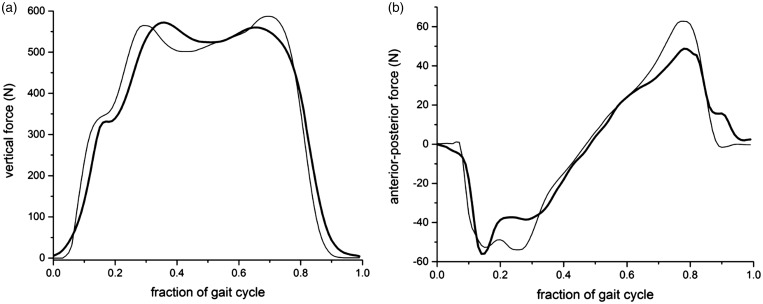
Methods: The device measures the forces between the user and his or her environment, particularly the force of the ground on the feet (F) that reflects lower limb joint torque coordination. In an environment that allows for exploration of the user's capabilities, various forms of real-time feedback guide neural training to produce F appropriate for remaining upright. Control of the foot plate motion is configurable and may be user driven or prescribed. Design choices are motivated from theory of motor control and learning as well as empirical observations of F during walking and standing.
Results: Preliminary studies of impaired individuals demonstrate the feasibility and potential utility of patient interaction with kinetic immersive interface for neuromuscular coordination enhancement.
Conclusion: Applications include study and rehabilitation of standing and walking after injury, amputation, and neurological insult, with an initial focus on stroke discussed here.
Keywords: Biofeedback; design requirements; evaluation; gait rehabilitation; neurorehabilitation; rehabilitation devices; robot-assisted rehabilitation; stroke rehabilitation.
Conflict of interest statement
The author(s) declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: KG has a patent 8,257,284 B2 issued (foot force biofeedback system), and both authors have patent P150292US01 (1512.530) pending (harness system). The authors are also owners of a startup company that aims to develop rehabilitation tools.
Figures





Similar articles
-
Bimanual elbow robotic orthoses: preliminary investigations on an impairment force-feedback rehabilitation method.Front Hum Neurosci. 2015 Mar 30;9:169. doi: 10.3389/fnhum.2015.00169. eCollection 2015. Front Hum Neurosci. 2015. PMID: 25870555 Free PMC article.
-
Effects of unilateral real-time biofeedback on propulsive forces during gait.J Neuroeng Rehabil. 2017 Jun 6;14(1):52. doi: 10.1186/s12984-017-0252-z. J Neuroeng Rehabil. 2017. PMID: 28583196 Free PMC article. Clinical Trial.
-
Biofeedback for robotic gait rehabilitation.J Neuroeng Rehabil. 2007 Jan 23;4:1. doi: 10.1186/1743-0003-4-1. J Neuroeng Rehabil. 2007. PMID: 17244363 Free PMC article.
-
Post-Stroke Walking Behaviors Consistent with Altered Ground Reaction Force Direction Control Advise New Approaches to Research and Therapy.Transl Stroke Res. 2016 Feb;7(1):3-11. doi: 10.1007/s12975-015-0435-5. Epub 2015 Dec 7. Transl Stroke Res. 2016. PMID: 26639659 Review.
-
A review in gait rehabilitation devices and applied control techniques.Disabil Rehabil Assist Technol. 2018 Nov;13(8):819-834. doi: 10.1080/17483107.2018.1447611. Epub 2018 Mar 25. Disabil Rehabil Assist Technol. 2018. PMID: 29577779 Review.
Cited by
-
Robotic Biofeedback for Post-Stroke Gait Rehabilitation: A Scoping Review.Sensors (Basel). 2022 Sep 22;22(19):7197. doi: 10.3390/s22197197. Sensors (Basel). 2022. PMID: 36236303 Free PMC article.
-
Frequency-dependent behavior of paretic and non-paretic leg force during standing post stroke.J Biomech. 2024 Feb;164:111953. doi: 10.1016/j.jbiomech.2024.111953. Epub 2024 Jan 26. J Biomech. 2024. PMID: 38309133 Free PMC article.
-
Biofeedback Training for 3-Dimensional Finger Force Control to Improve Upper Limb Function Poststroke: An RCT.Stroke. 2025 Aug;56(8):2266-2276. doi: 10.1161/STROKEAHA.125.050965. Epub 2025 May 22. Stroke. 2025. PMID: 40401398 Clinical Trial.
-
Versatile GCH Control Software for Correction of Loads Applied to Forearm Crutches During Gait Recovery Through Technological Feedback: Development and Implementation Study.J Med Internet Res. 2021 Sep 22;23(9):e27602. doi: 10.2196/27602. J Med Internet Res. 2021. PMID: 34550073 Free PMC article.
References
-
- Lord SE, McPherson K, McNaughton HK, et al. Community ambulation after stroke: how important and obtainable is it and what measures appear predictive? Arch Phys Med Rehabil 2004; 85: 234–239. - PubMed
-
- Kirshblum SC, Priebe MM, Ho CH, et al. Spinal cord injury medicine. 3. Rehabilitation phase after acute spinal cord injury. Arch Phys Med Rehabil 2007; 88: S62–S70. - PubMed
-
- Sackley CM, Lincoln NB. Physiotherapy for stroke patients: a survey of current practice. Physiother Theor Pract 1996; 12: 87–96.
LinkOut - more resources
Full Text Sources
