

A Driver's Physiology Sensor-Based Driving Risk Prediction Method for Lane-Changing Process Using Hidden Markov Model
- PMID: 31200499
- PMCID: PMC6631293
- DOI: 10.3390/s19122670
A Driver's Physiology Sensor-Based Driving Risk Prediction Method for Lane-Changing Process Using Hidden Markov Model
Abstract
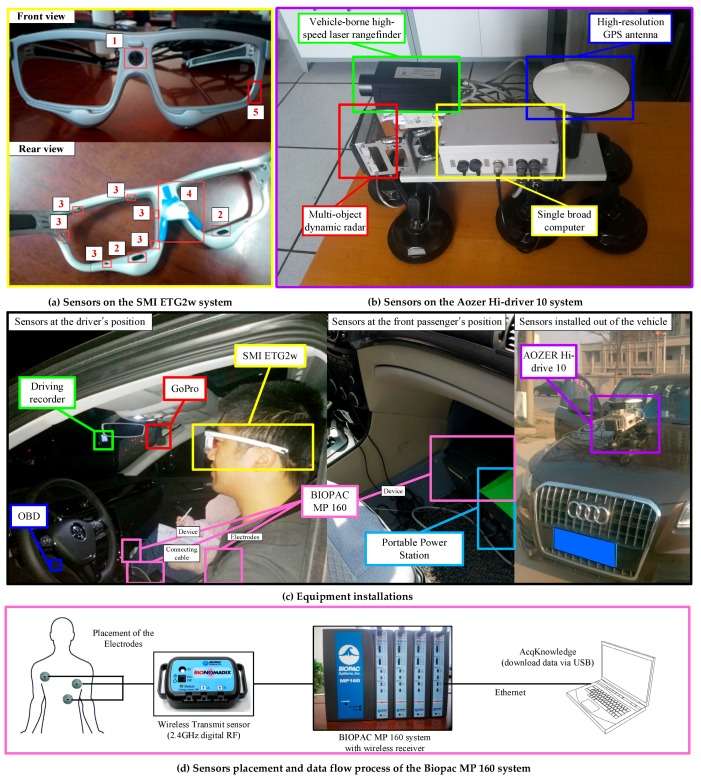
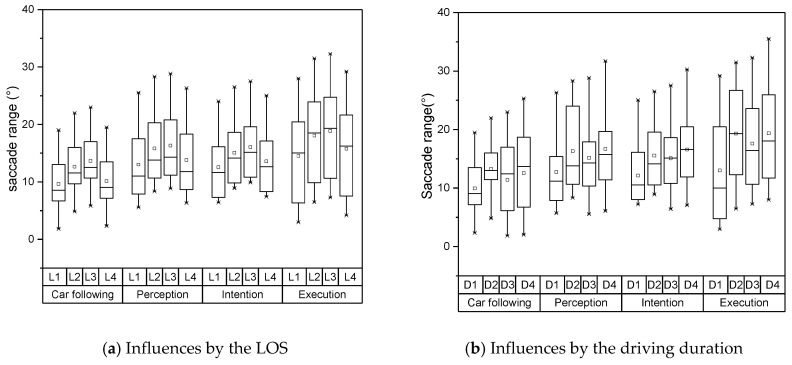
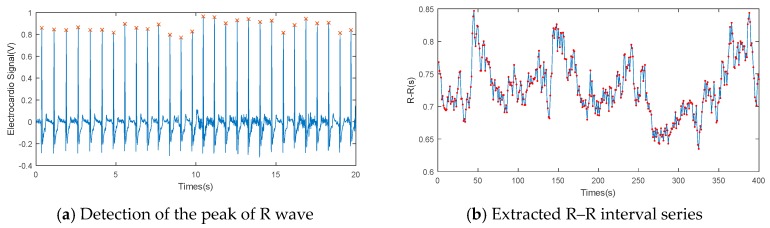
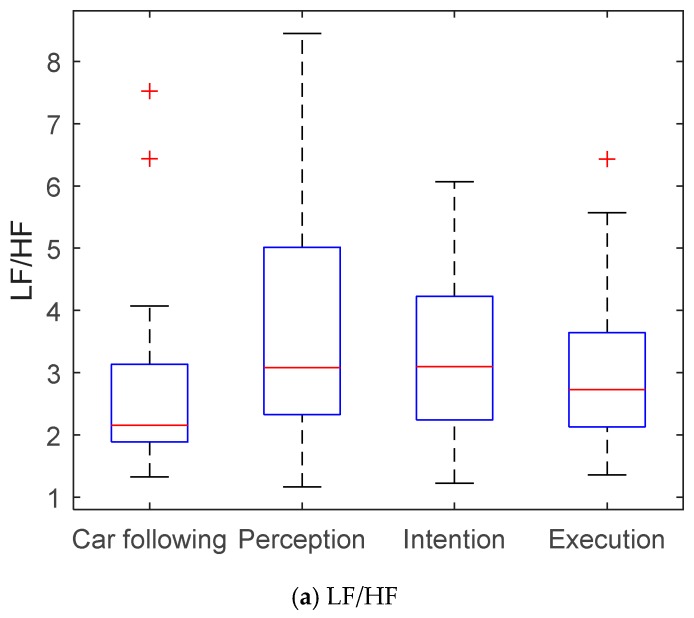
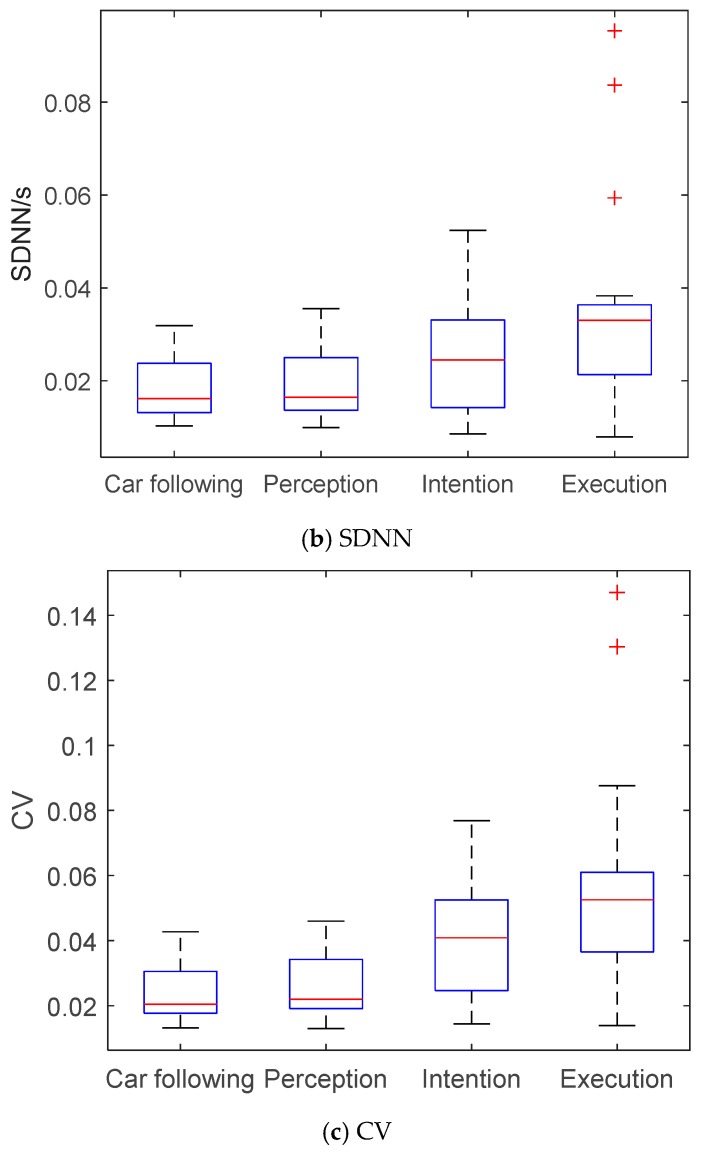
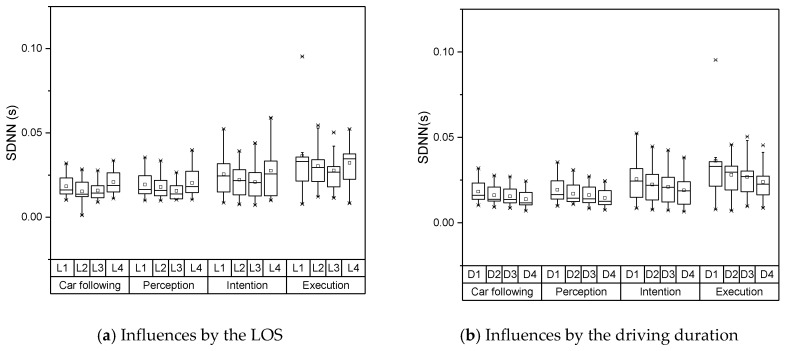
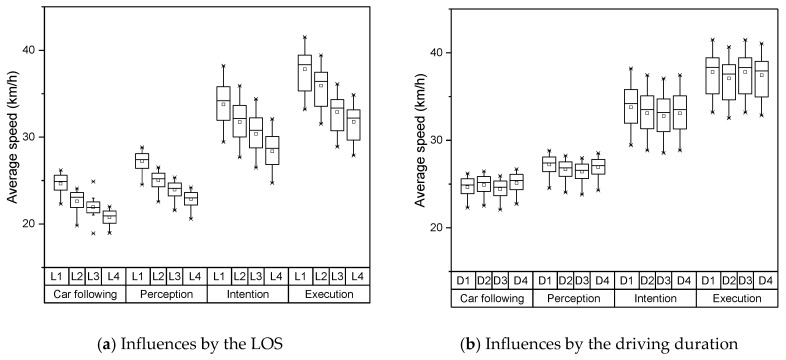
Lane changing is considered as one of the most dangerous driving behaviors because drivers have to deal with the traffic conflicts on both the current and target lanes. This study aimed to propose a method of predicting the driving risks during the lane-changing process using drivers' physiology measurement data and vehicle dynamic data. All the data used in the proposed model were obtained by portable sensors with the capability of recording data in the actual driving process. A hidden Markov model (HMM) was proposed to link driving risk with drivers' physiology information and vehicle dynamic data. The two-factor indicators were established to evaluate the performances of eye movement, heart rate variability, and vehicle dynamic parameters on driving risk. The standard deviation of normal to normal R-R intervals of the heart rate (SDNN), fixation duration, saccade range, and average speed were then selected as the input of the HMM. The HMM was trained and tested using field-observed data collected in Xi'an City. The proposed model using the data from the physiology measurement sensor can identify dangerous driving state from normal driving state and predict the transition probability between these two states. The results match the perceptions of the tested drivers with an accuracy rate of 90.67%. The proposed model can be used to develop proactive crash prevention strategies.
Keywords: driving risk prediction; hidden Markov model; lane changing; physiology measurement sensor; vehicle dynamic data.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures





References
-
- Zheng Z. Recent developments and research needs in modeling lane changing. Transp. Res. Part B Methodol. 2014;60:16–32. doi: 10.1016/j.trb.2013.11.009. - DOI
-
- Coughlin J.F., Reimer B., Mehler B. Monitoring, managing, and motivating driver safety and well-being. IEEE Pervasive Comput. 2011;10:14–21. doi: 10.1109/MPRV.2011.54. - DOI
-
- De Waard D. The Measurement of Drivers’ Mental Workload, in Traffic Research Centre. University of Groningen; Haren, The Netherlands: 1996.
-
- Lefèvre S., Vasquez D., Laugier C. A survey on motion prediction and risk assessment for intelligent vehicles. ROBOMECH J. 2014;1:1. doi: 10.1186/s40648-014-0001-z. - DOI
Grants and funding
- 2017YFC0803906/National R&D Plan of China
- 51408049/National Natural Science Foundation of China
- 2016M590914/China Postdoctoral Science Foundation
- 2016BSHEDZZ134/Shaanxi Postdoctoral Science Research project
- YGY2017KYPT-01/Open Foundation Projects of the State Key Laboratory of Road Engineering Safety and Health in Cold and High-Altitude Regions
LinkOut - more resources
Full Text Sources
Other Literature Sources
