

Self-Triggered Formation Control of Nonholonomic Robots
- PMID: 31207941
- PMCID: PMC6631130
- DOI: 10.3390/s19122689
Self-Triggered Formation Control of Nonholonomic Robots
Abstract
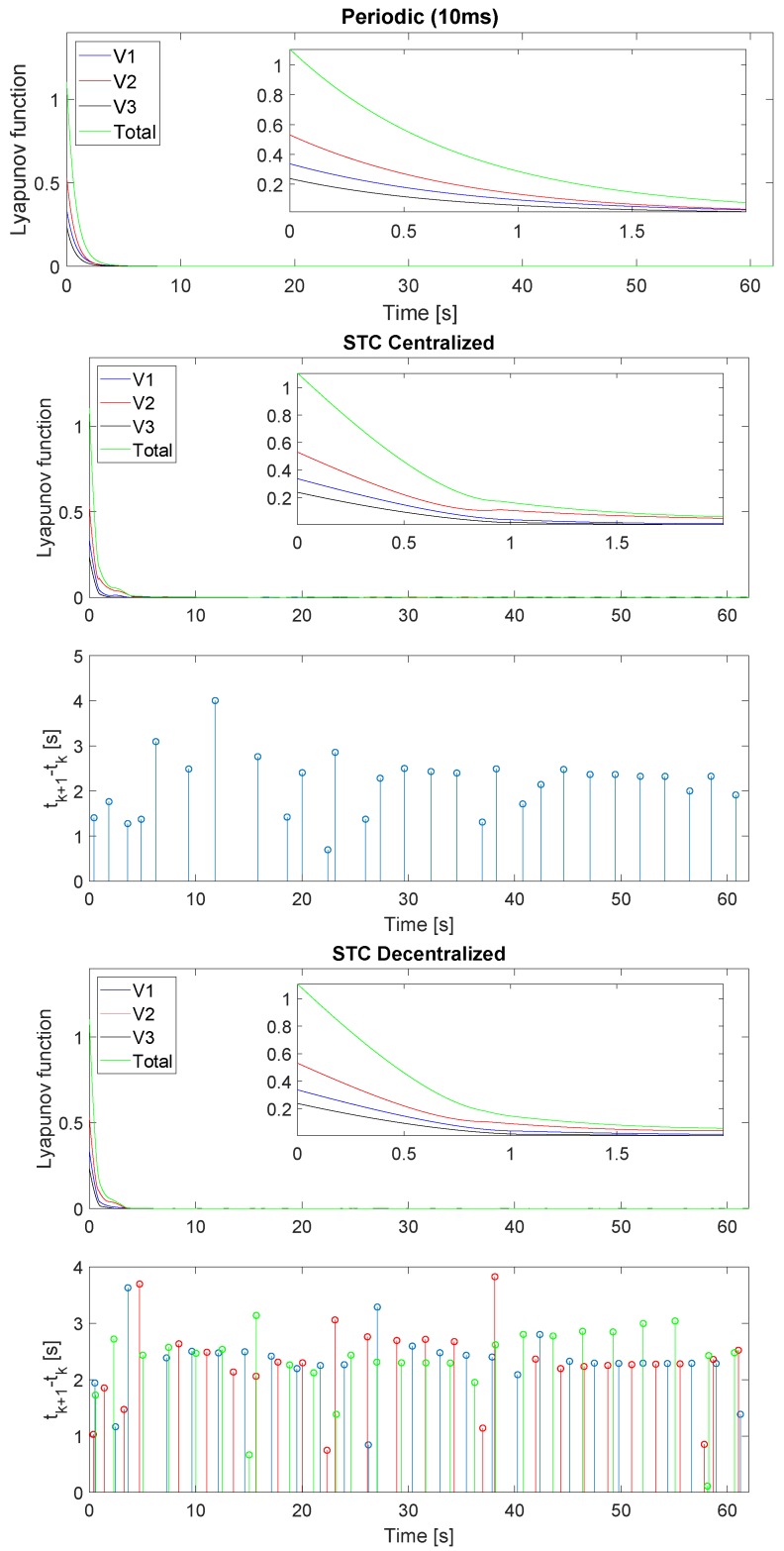
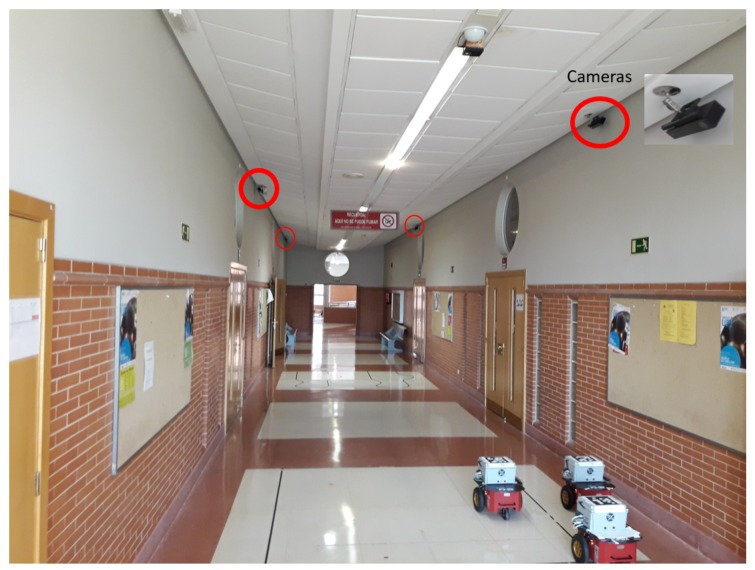
In this paper, we report the design of an aperiodic remote formation controller applied to nonholonomic robots tracking nonlinear, trajectories using an external positioning sensor network. Our main objective is to reduce wireless communication with external sensors and robots while guaranteeing formation stability. Unlike most previous work in the field of aperiodic control, we design a self-triggered controller that only updates the control signal according to the variation of a Lyapunov function, without taking the measurement error into account. The controller is responsible for scheduling measurement requests to the sensor network and for computing and sending control signals to the robots. We design two triggering mechanisms: centralized, taking into account the formation state and decentralized, considering the individual state of each unit. We present a statistical analysis of simulation results, showing that our control solution significantly reduces the need for communication in comparison with periodic implementations, while preserving the desired tracking performance. To validate the proposal, we also perform experimental tests with robots remotely controlled by a mini PC through an IEEE 802.11g wireless network, in which robots pose is detected by a set of camera sensors connected to the same wireless network.
Keywords: formation control; nonlinear trajectory tracking; practical stability; real-time scheduling; remote guidance; self-triggered Lyapunov control.
Conflict of interest statement
The authors declare no conflict of interest.
Figures










References
-
- Oh K.K., Park M.C., Ahn H.S. A survey of multi-agent formation control. Automatica. 2015;53:424–440. doi: 10.1016/j.automatica.2014.10.022. - DOI
-
- Santos C., Espinosa F., Santiso E., Martínez M., Mazo M. Aperiodic Consensus Control for Tracking Nonlinear Trajectories of a Platoon of Vehicles; Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems; Gran Canaria, Spain. 15–18 September 2015; pp. 1983–1988.
-
- Dong X., Yu B., Shi Z., Zhong Y. Time-Varying Formation Control for Unmanned Aerial Vehicles: Theories and Applications. IEEE Trans. Control Syst. Technol. 2015;23:340–348. doi: 10.1109/TCST.2014.2314460. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
