

A chordwise offset of the wing-pitch axis enhances rotational aerodynamic forces on insect wings: a numerical study
- PMID: 31213176
- PMCID: PMC6597777
- DOI: 10.1098/rsif.2019.0118
A chordwise offset of the wing-pitch axis enhances rotational aerodynamic forces on insect wings: a numerical study
Abstract
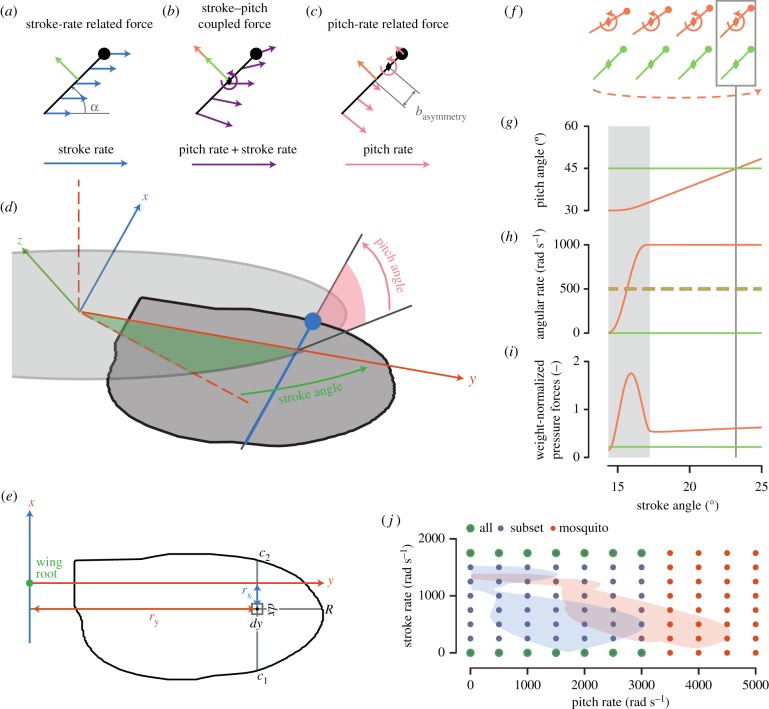
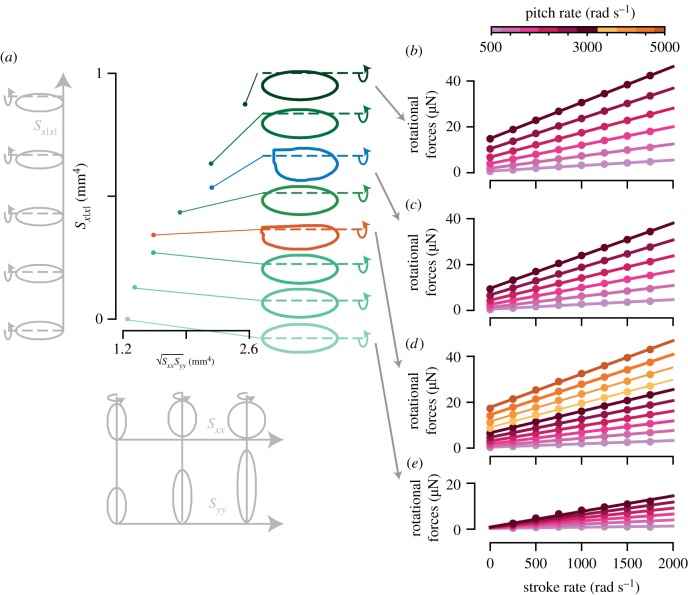
Most flying animals produce aerodynamic forces by flapping their wings back and forth with a complex wingbeat pattern. The fluid dynamics that underlies this motion has been divided into separate aerodynamic mechanisms of which rotational lift, that results from fast wing pitch rotations, is particularly important for flight control and manoeuvrability. This rotational force mechanism has been modelled using Kutta-Joukowski theory, which combines the forward stroke motion of the wing with the fast pitch motion to compute forces. Recent studies, however, suggest that hovering insects can produce rotational forces at stroke reversal, without a forward motion of the wing. We have conducted a broad numerical parametric study over a range of wing morphologies and wing kinematics to show that rotational force production depends on two mechanisms: (i) conventional Kutta-Joukowski-based rotational forces and (ii) a rotational force mechanism that enables insects with an offset of the pitch axis relative to the wing's chordwise symmetry axis to generate rotational forces in the absence of forward wing motion. Because flying animals produce control actions frequently near stroke reversal, this pitch-axis-offset dependent aerodynamic mechanism may be particularly important for understanding control and manoeuvrability in natural flyers.
Keywords: aerodynamic mechanisms; computational fluid dynamics; flapping flight; fruit fly Drosophila hydei; malaria mosquito Anopheles coluzzii; wing morphology.
Conflict of interest statement
We declare we have no competing interests.
Figures





References
-
- Ellington CP. 1984. The aerodynamics of hovering insect flight. IV. Aeorodynamic mechanisms. Phil. Trans. R. Soc. Lond. B 305, 79–113. (10.1098/rstb.1984.0052) - DOI
-
- van den Berg C, Ellington CP. 1997. The three-dimensional leading-edge vortex of a ‘hovering’ model hawkmoth. Phil. Trans. R. Soc. Lond. B 352, 329–340. (10.1098/rstb.1997.0024) - DOI
-
- Spedding GR, Maxworthy T. 1986. The generation of circulation and lift in a rigid two-dimensional fling. J. Fluid Mech. 165, 247–272. (10.1017/S0022112086003087) - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Molecular Biology Databases