

Augmenting camera images with gamma detector data : A novel approach to support sentinel lymph node biopsy
- PMID: 31214811
- PMCID: PMC6582166
- DOI: 10.1186/s40658-019-0245-z
Augmenting camera images with gamma detector data : A novel approach to support sentinel lymph node biopsy
Abstract
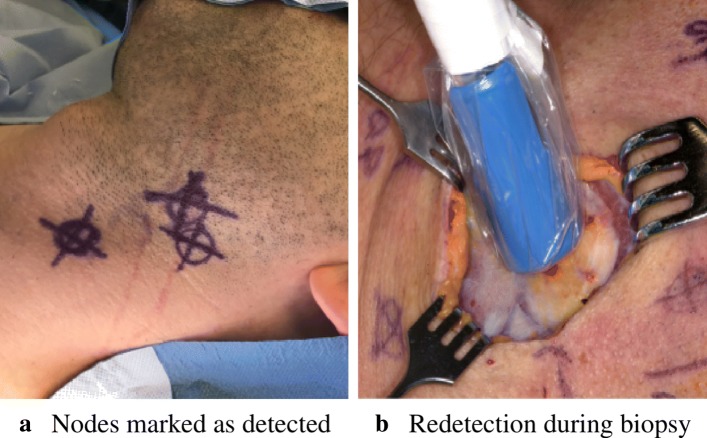
Background: Squamous cell carcinoma in the head and neck region is one of the most widespread cancers with high morbidity. Classic treatment comprises the complete removal of the lymphatics together with the cancerous tissue. Recent studies have shown that such interventions are only required in 30% of the patients. Sentinel lymph node biopsy is an alternative method to stage the malignancy in a less invasive manner and to avoid overtreatment. In this paper, we present a novel approach that enables a future augmented reality device which improves the biopsy procedure by visual means.
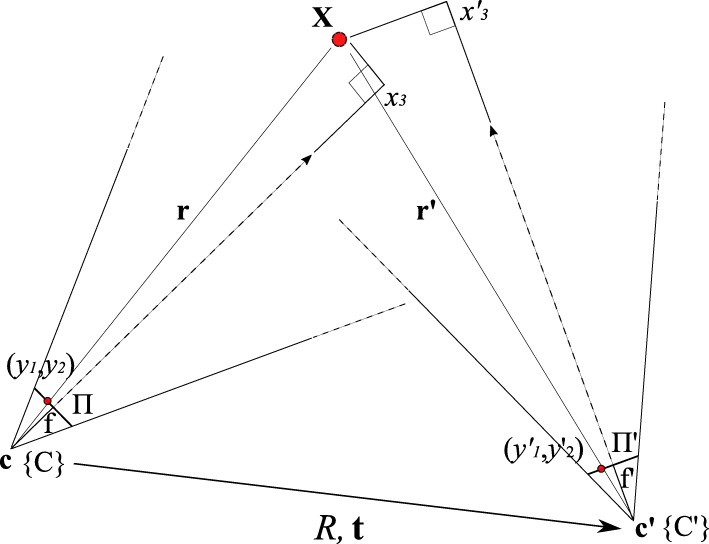
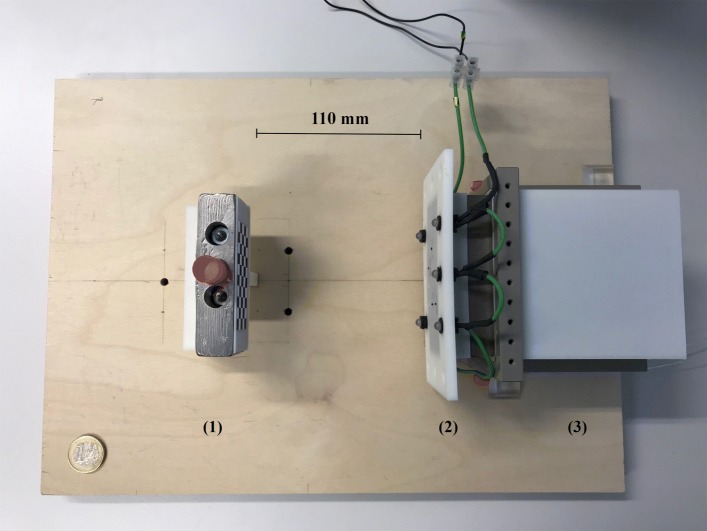
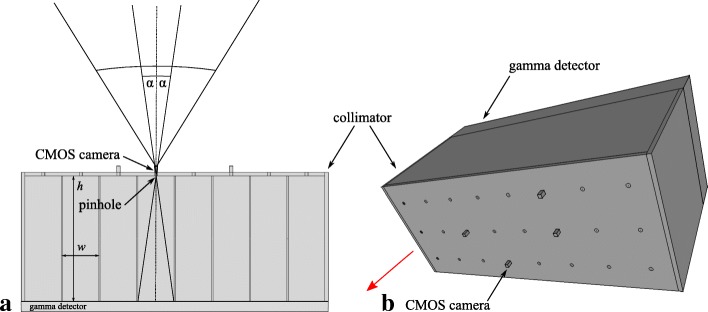
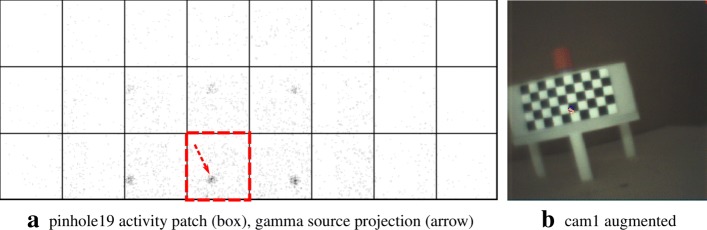
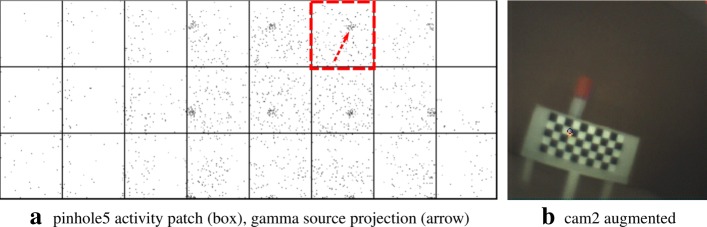
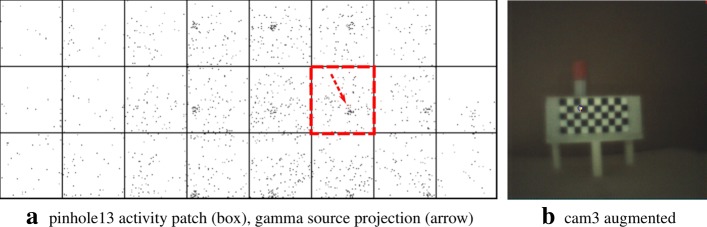
Methods: We propose a co-calibration scheme for axis-aligned miniature cameras with pinholes of a gamma ray collimating and sensing device and show results gained by experiments, based on a calibration target visible for both modalities.
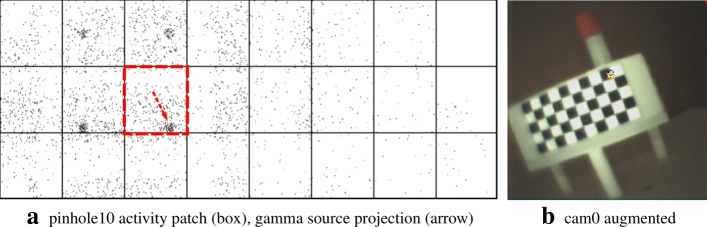
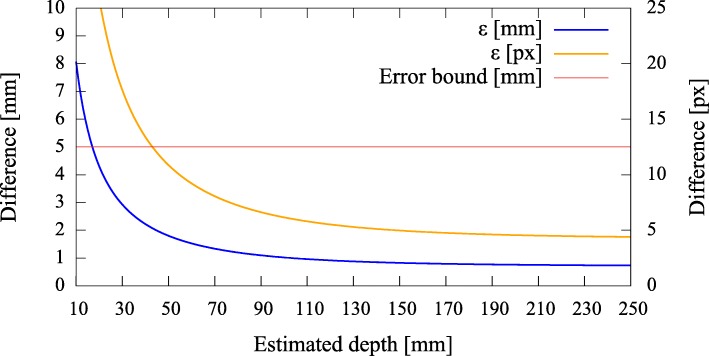
Results: Visual inspection and quantitative evaluation of the augmentation of optical camera images with gamma information are congruent with known gamma source landmarks.
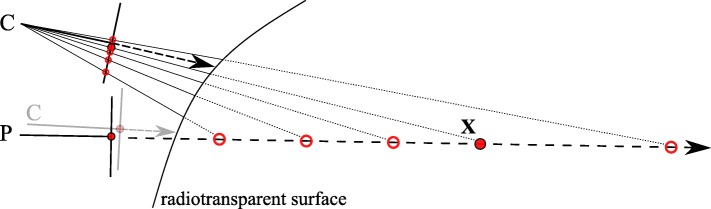
Conclusions: Combining a multi-pinhole collimator with axis-aligned miniature cameras to augment optical images using gamma detector data is promising. As such, our approach might be applicable for breast cancer and melanoma staging as well, which are also based on sentinel lymph node biopsy.
Keywords: Augmented reality; Multi-modality calibration; Projective geometry; Radioguided surgery; Sentinel lymph node biopsy.
Conflict of interest statement
The authors declare that they have no competing interests.
Figures




References
-
- Radkani P, Mesko TW, Paramo JC. Validation of the sentinel lymph node biopsy technique in head and neck cancers of the oral cavity. Am Surg. 2013;79(12):1295–7. - PubMed
LinkOut - more resources
Full Text Sources
Research Materials
