

Optimized PID Controller Based on Beetle Antennae Search Algorithm for Electro-Hydraulic Position Servo Control System
- PMID: 31216632
- PMCID: PMC6631667
- DOI: 10.3390/s19122727
Optimized PID Controller Based on Beetle Antennae Search Algorithm for Electro-Hydraulic Position Servo Control System
Abstract
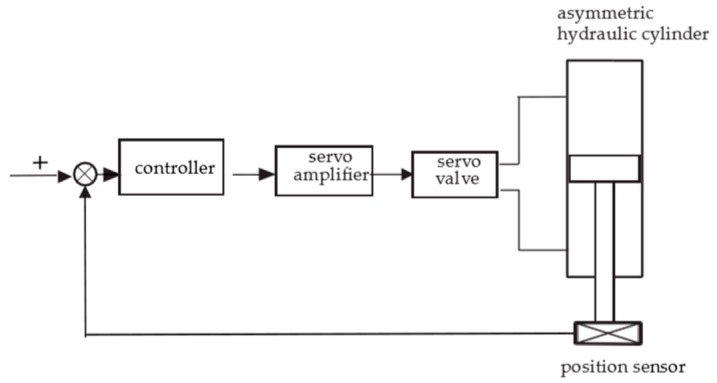
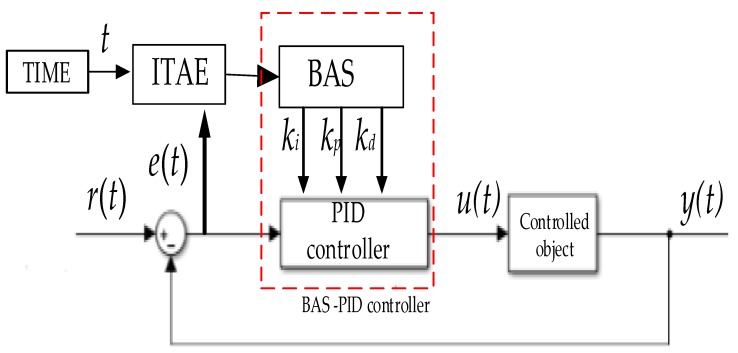
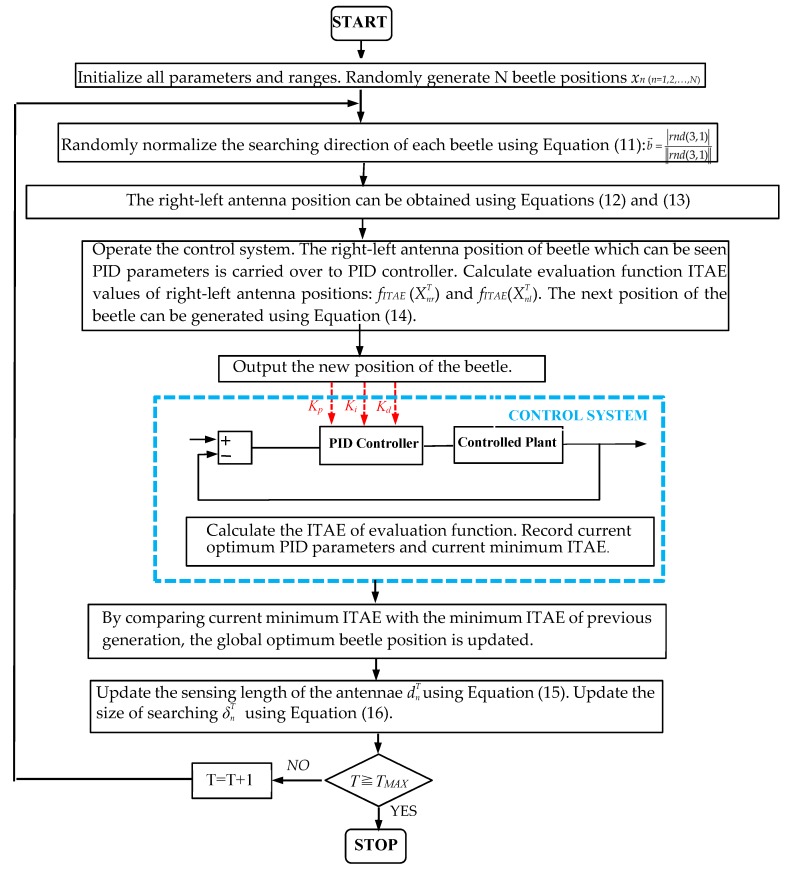
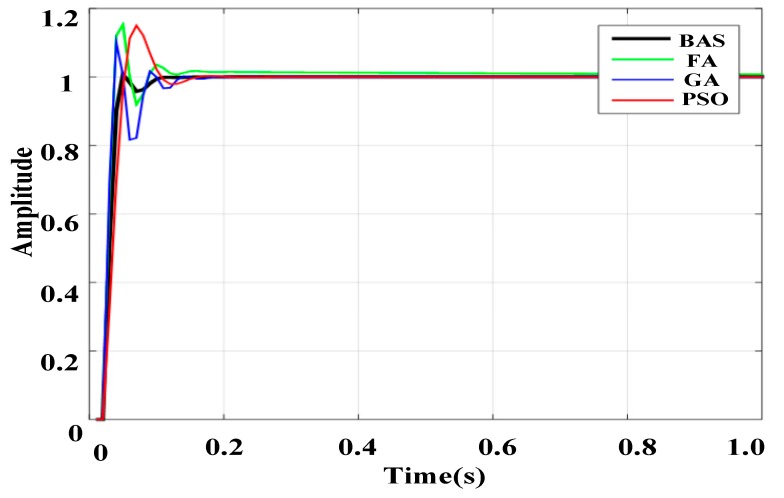
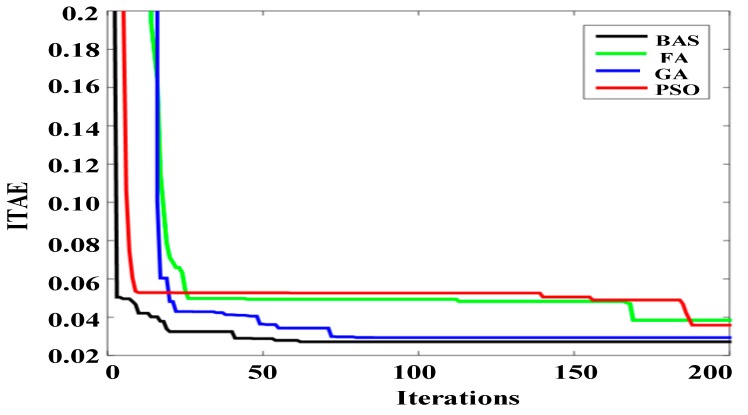
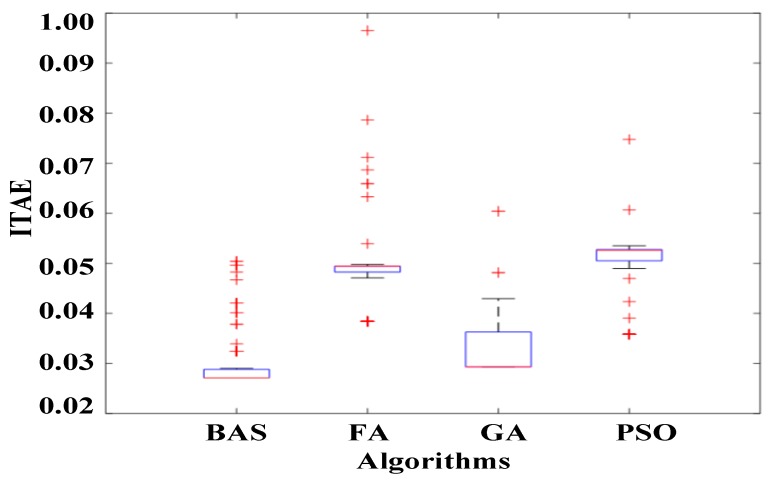
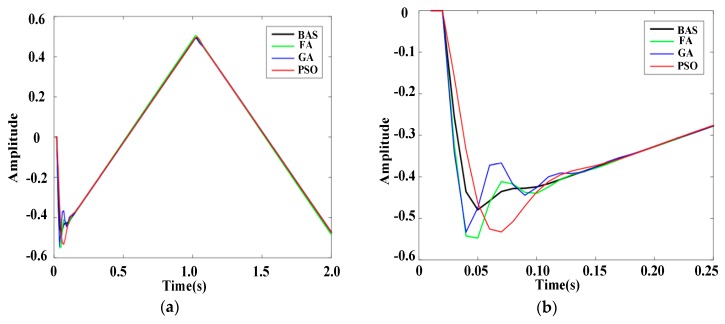
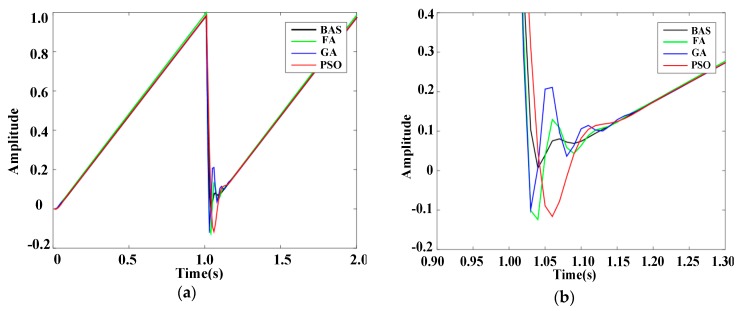
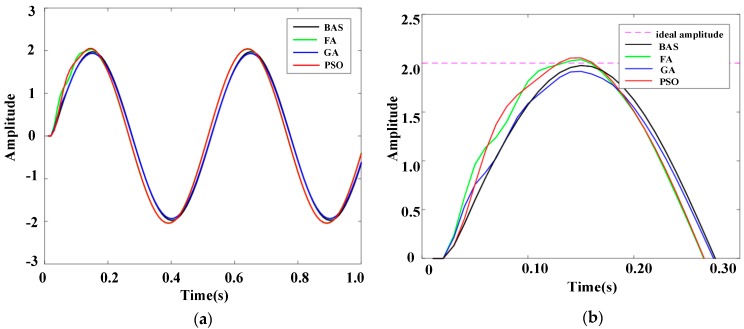
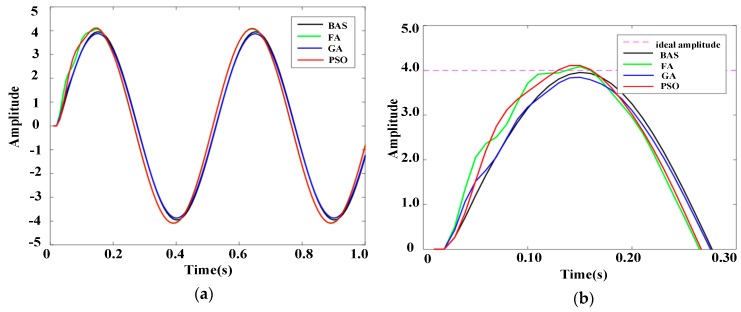
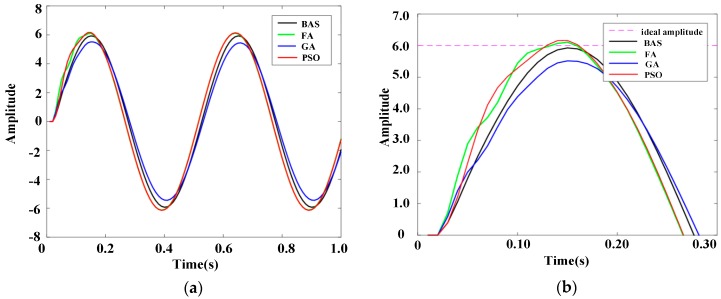
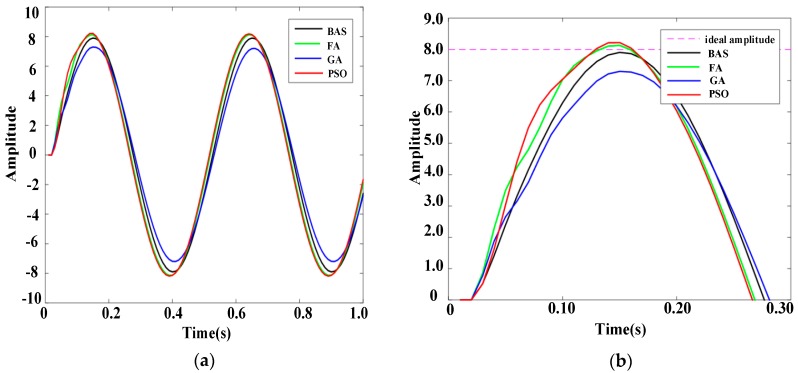
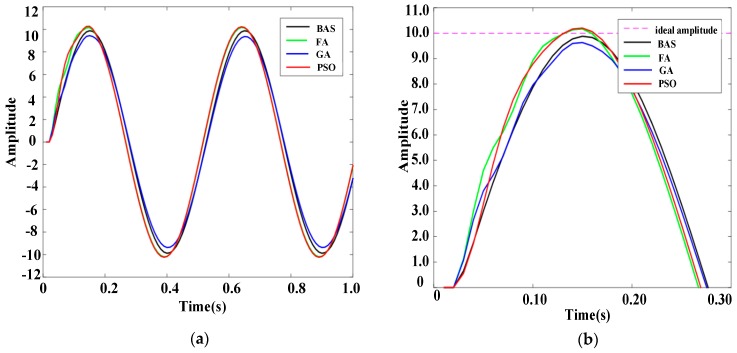
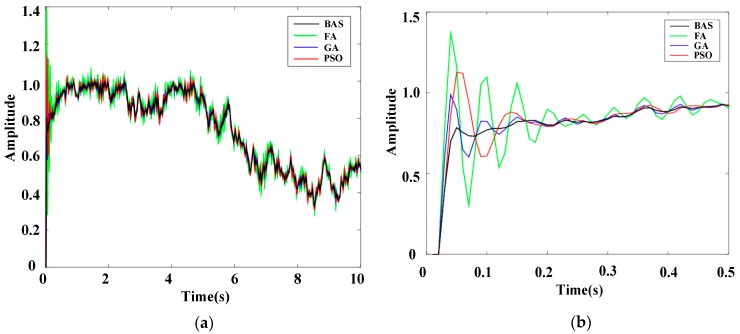
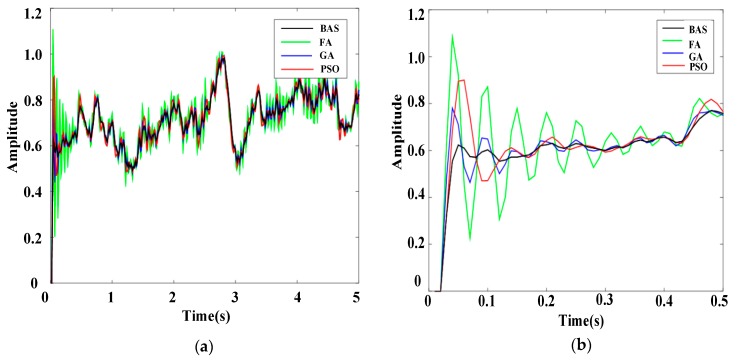
To improve the controllability of an electro-hydraulic position servo control system while simultaneously enhancing the anti-jamming ability of a PID controller, a compound PID controller that combines the beetle antennae search algorithm with PID strategy was proposed, and used to drive the position servo control system of the electro-hydraulic servo system. A BAS-PID controller was designed, and the beetle antennae search algorithm was used to tune PID parameters so that the disturbance signal of the system was effectively restrained. Initially, the basic mathematical model of the electro-hydraulic position servo control system was established through theoretical analysis. The transfer function model was obtained by identifying system parameters. Then, the PID parameter-tuning problem was converted into a class of three-dimensional parameter optimization problem, and gains of PID controllers were adjusted using the beetle antennae search algorithm. Finally, by comparing the effectiveness of different algorithms, simulation and experimental results revealed that the BAS-PID controller can greatly enhance the performance of the electro-hydraulic position servo control system and inhibit external disturbances when different interference signals are used to test the system's robustness.
Keywords: PID controller; beetle antennae search algorithm; electro-hydraulic servo system.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures

References
-
- Yao J., Jiao Z., Ma D., Yan L. High-Accuracy Tracking Control of Hydraulic Rotary Actuators with Modeling Uncertainties. IEEE ASME Trans. Mechatron. 2014;19:633–641. doi: 10.1109/TMECH.2013.2252360. - DOI
-
- Has Z., Rahmat M.F.A., Husain A.R., Ishaque K., Ghazali R., Ahmad M.N., Sam Y.M., Rozali S.M. Robust Position Tracking Control of an Electro-Hydraulic Actuator in the Presence of Friction and Internal Leakage. Arab. J. Sci. Eng. 2013;39:2965–2978. doi: 10.1007/s13369-013-0888-3. - DOI
-
- Yang G., Yao J., Le G., Ma D. Adaptive integral robust control of hydraulic systems with asymptotic tracking. Mechatronics. 2016;40:78–86. doi: 10.1016/j.mechatronics.2016.10.007. - DOI
-
- Yuan H.B., Na H.C., Kim Y.-B. Robust MPC–PIC force control for an electro-hydraulic servo system with pure compressive elastic load. Control Eng. Pract. 2018;79:170–184. doi: 10.1016/j.conengprac.2018.07.009. - DOI
-
- Wang D., Zhao D., Gong M., Yang B. Research on Robust Model Predictive Control for Electro-Hydraulic Servo Active Suspension Systems. IEEE Access. 2018;6:3231–3240. doi: 10.1109/ACCESS.2017.2787663. - DOI
LinkOut - more resources
Full Text Sources
