

Acoustic evaluation of behavioral states predicted from GPS tracking: a case study of a marine fishing bat
- PMID: 31223482
- PMCID: PMC6567457
- DOI: 10.1186/s40462-019-0163-7
Acoustic evaluation of behavioral states predicted from GPS tracking: a case study of a marine fishing bat
Abstract
Background: Multiple methods have been developed to infer behavioral states from animal movement data, but rarely has their accuracy been assessed from independent evidence, especially for location data sampled with high temporal resolution. Here we evaluate the performance of behavioral segmentation methods using acoustic recordings that monitor prey capture attempts.
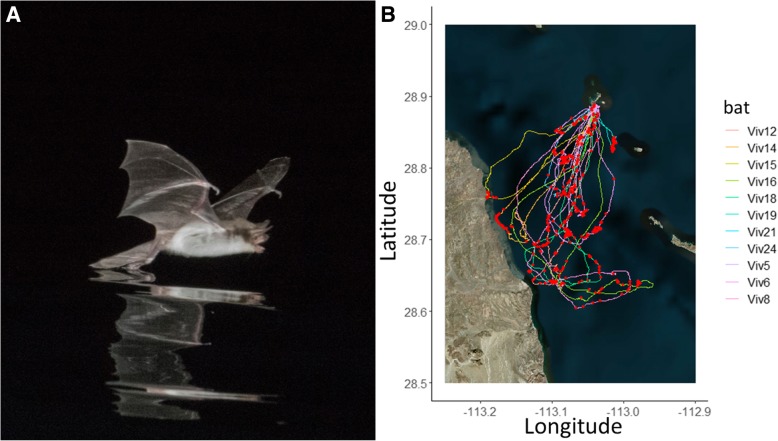
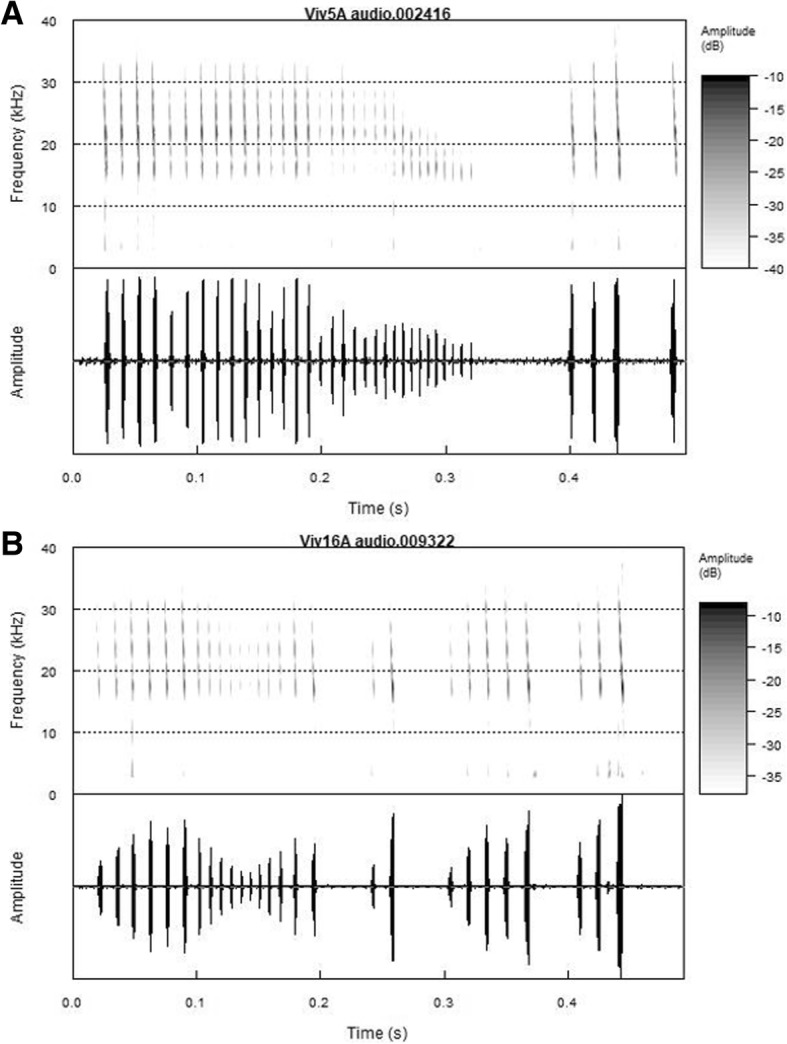
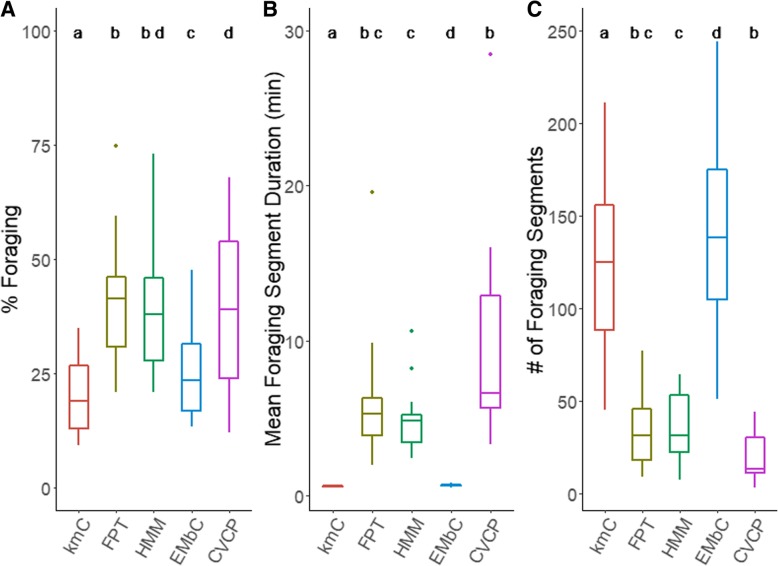
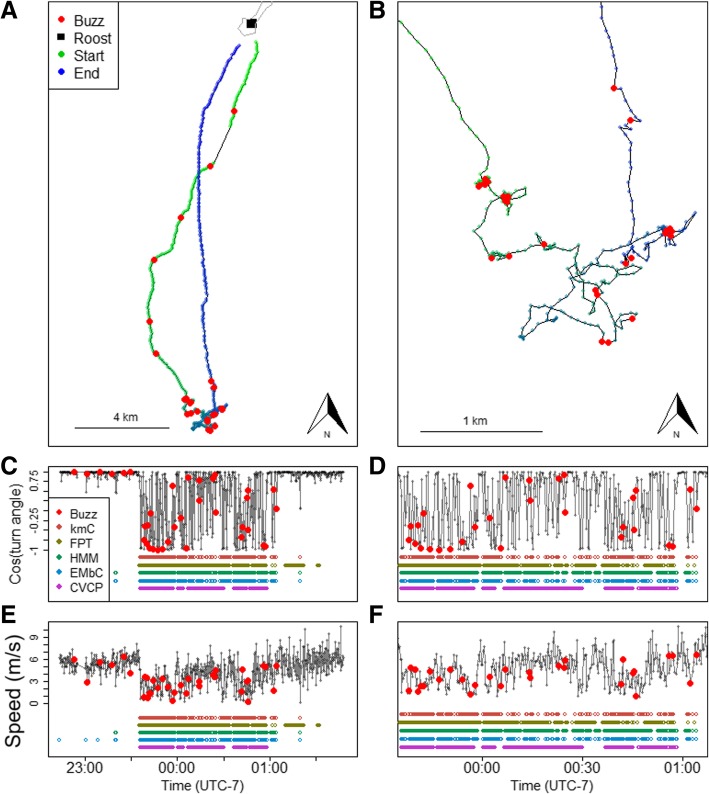
Methods: We recorded GPS locations and ultrasonic audio during the foraging trips of 11 Mexican fish-eating bats, Myotis vivesi, using miniature bio-loggers. We then applied five different segmentation algorithms (k-means clustering, expectation-maximization and binary clustering, first-passage time, hidden Markov models, and correlated velocity change point analysis) to infer two behavioral states, foraging and commuting, from the GPS data. To evaluate the inference, we independently identified characteristic patterns of biosonar calls ("feeding buzzes") that occur during foraging in the audio recordings. We then compared segmentation methods on how well they correctly identified the two behaviors and if their estimates of foraging movement parameters matched those for locations with buzzes.
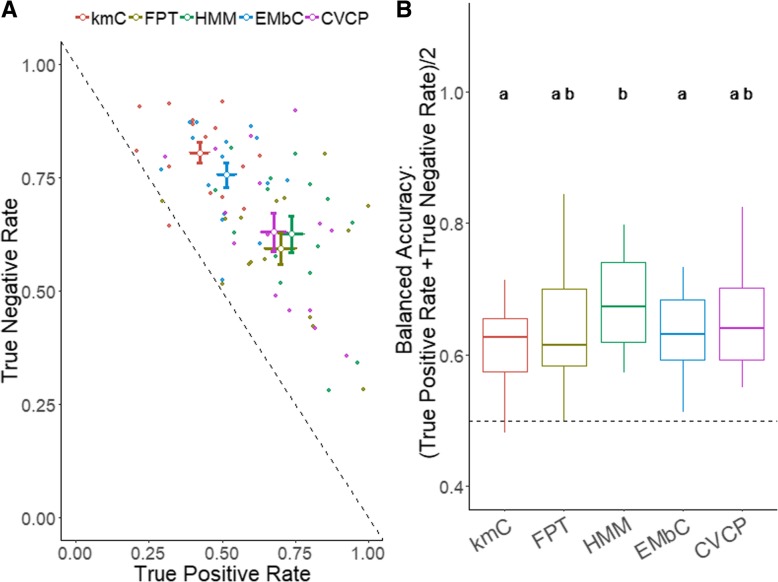
Results: While the five methods differed in the median percentage of buzzes occurring during predicted foraging events, or true positive rate (44-75%), a two-state hidden Markov model had the highest median balanced accuracy (67%). Hidden Markov models and first-passage time predicted foraging flight speeds and turn angles similar to those measured at locations with feeding buzzes and did not differ in the number or duration of predicted foraging events.
Conclusion: The hidden Markov model method performed best at identifying fish-eating bat foraging segments; however, first-passage time was not significantly different and gave similar parameter estimates. This is the first attempt to evaluate segmentation methodologies in echolocating bats and provides an evaluation framework that can be used on other species.
Keywords: Behavioral change point analysis; Correlated velocity movement; Expectation maximization and binary clustering; First-passage time; Foraging; GPS telemetry; Hidden Markov models; K-means; Path segmentation.
Conflict of interest statement
Competing interestsThe authors declare that they have no competing interest.
Figures
References
-
- Weimerskirch H, Pinaud D, Pawlowski F, Bost CA. Does prey capture induce area-restricted search? A fine-scale study using GPS in a marine predator, the wandering albatross. Am Nat. 2017;170:734. - PubMed
LinkOut - more resources
Full Text Sources
