

A Low-Cost, Wireless, 3-D-Printed Custom Armband for sEMG Hand Gesture Recognition
- PMID: 31238529
- PMCID: PMC6631507
- DOI: 10.3390/s19122811
A Low-Cost, Wireless, 3-D-Printed Custom Armband for sEMG Hand Gesture Recognition
Abstract
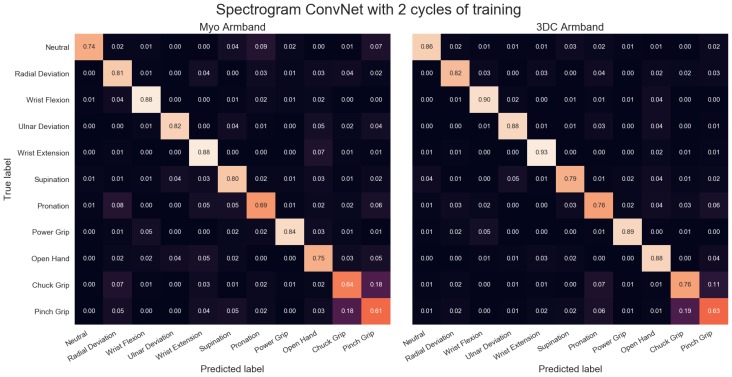
Wearable technology can be employed to elevate the abilities of humans to perform demanding and complex tasks more efficiently. Armbands capable of surface electromyography (sEMG) are attractive and noninvasive devices from which human intent can be derived by leveraging machine learning. However, the sEMG acquisition systems currently available tend to be prohibitively costly for personal use or sacrifice wearability or signal quality to be more affordable. This work introduces the 3DC Armband designed by the Biomedical Microsystems Laboratory in Laval University; a wireless, 10-channel, 1000 sps, dry-electrode, low-cost (∼150 USD) myoelectric armband that also includes a 9-axis inertial measurement unit. The proposed system is compared with the Myo Armband by Thalmic Labs, one of the most popular sEMG acquisition systems. The comparison is made by employing a new offline dataset featuring 22 able-bodied participants performing eleven hand/wrist gestures while wearing the two armbands simultaneously. The 3DC Armband systematically and significantly ( p < 0.05 ) outperforms the Myo Armband, with three different classifiers employing three different input modalities when using ten seconds or more of training data per gesture. This new dataset, alongside the source code, Altium project and 3-D models are made readily available for download within a Github repository.
Keywords: acquisition system; gesture recognition; sEMG; surface electromyogram; wearable sensors.
Conflict of interest statement
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of the data; in the writing of the manuscript; or in the decision to publish the results.
Figures
























Similar articles
-
High-Performance Surface Electromyography Armband Design for Gesture Recognition.Sensors (Basel). 2023 May 21;23(10):4940. doi: 10.3390/s23104940. Sensors (Basel). 2023. PMID: 37430853 Free PMC article.
-
A Fast and Low-Impact Embedded Orientation Correction Algorithm for Hand Gesture Recognition Armbands.Sensors (Basel). 2025 Mar 30;25(7):2188. doi: 10.3390/s25072188. Sensors (Basel). 2025. PMID: 40218702 Free PMC article.
-
Inferring Static Hand Poses from a Low-Cost Non-Intrusive sEMG Sensor.Sensors (Basel). 2019 Jan 17;19(2):371. doi: 10.3390/s19020371. Sensors (Basel). 2019. PMID: 30658480 Free PMC article.
-
Evaluation of the Myo armband for the classification of hand motions.IEEE Int Conf Rehabil Robot. 2017 Jul;2017:1211-1214. doi: 10.1109/ICORR.2017.8009414. IEEE Int Conf Rehabil Robot. 2017. PMID: 28813986
-
Wearable Sensor-Based Sign Language Recognition: A Comprehensive Review.IEEE Rev Biomed Eng. 2021;14:82-97. doi: 10.1109/RBME.2020.3019769. Epub 2021 Jan 26. IEEE Rev Biomed Eng. 2021. PMID: 32845843 Review.
Cited by
-
Multi-Category Gesture Recognition Modeling Based on sEMG and IMU Signals.Sensors (Basel). 2022 Aug 5;22(15):5855. doi: 10.3390/s22155855. Sensors (Basel). 2022. PMID: 35957417 Free PMC article.
-
Introduction of a sEMG Sensor System for Autonomous Use by Inexperienced Users.Sensors (Basel). 2020 Dec 21;20(24):7348. doi: 10.3390/s20247348. Sensors (Basel). 2020. PMID: 33371409 Free PMC article.
-
Interpreting Deep Learning Features for Myoelectric Control: A Comparison With Handcrafted Features.Front Bioeng Biotechnol. 2020 Mar 3;8:158. doi: 10.3389/fbioe.2020.00158. eCollection 2020. Front Bioeng Biotechnol. 2020. PMID: 32195238 Free PMC article.
-
Integrating intention-based systems in human-robot interaction: a scoping review of sensors, algorithms, and trust.Front Robot AI. 2023 Oct 9;10:1233328. doi: 10.3389/frobt.2023.1233328. eCollection 2023. Front Robot AI. 2023. PMID: 37876910 Free PMC article.
-
High-Performance Surface Electromyography Armband Design for Gesture Recognition.Sensors (Basel). 2023 May 21;23(10):4940. doi: 10.3390/s23104940. Sensors (Basel). 2023. PMID: 37430853 Free PMC article.
References
-
- Hakonen M., Piitulainen H., Visala A. Current state of digital signal processing in myoelectric interfaces and related applications. Biomed. Signal Process. Control. 2015;18:334–359. doi: 10.1016/j.bspc.2015.02.009. - DOI
-
- Allard U.C., Nougarou F., Fall C.L., Giguère P., Gosselin C., Laviolette F., Gosselin B. A convolutional neural network for robotic arm guidance using semg based frequency-features; Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); Daejeon, Korea. 9–14 October 2016; pp. 2464–2470.
-
- Janke M., Diener L. Emg-to-speech: Direct generation of speech from facial electromyographic signals. IEEE/ACM Trans. Audio Speech Lang. Process. 2017;25:2375–2385. doi: 10.1109/TASLP.2017.2738568. - DOI
-
- Oskoei M.A., Hu H. Myoelectric control systems—A survey. Biomed. Signal Process. Control. 2007;2:275–294. doi: 10.1016/j.bspc.2007.07.009. - DOI
-
- Stegeman D.F., Kleine B.U., Lapatki B.G., Van Dijk J.P. High-density surface EMG: Techniques and applications at a motor unit level. Biocybern. Biomed. Eng. 2012;32:3–27.
