

Advances in biomimetic stimuli responsive soft grippers
- PMID: 31257552
- PMCID: PMC6599812
- DOI: 10.1186/s40580-019-0191-4
Advances in biomimetic stimuli responsive soft grippers
Abstract
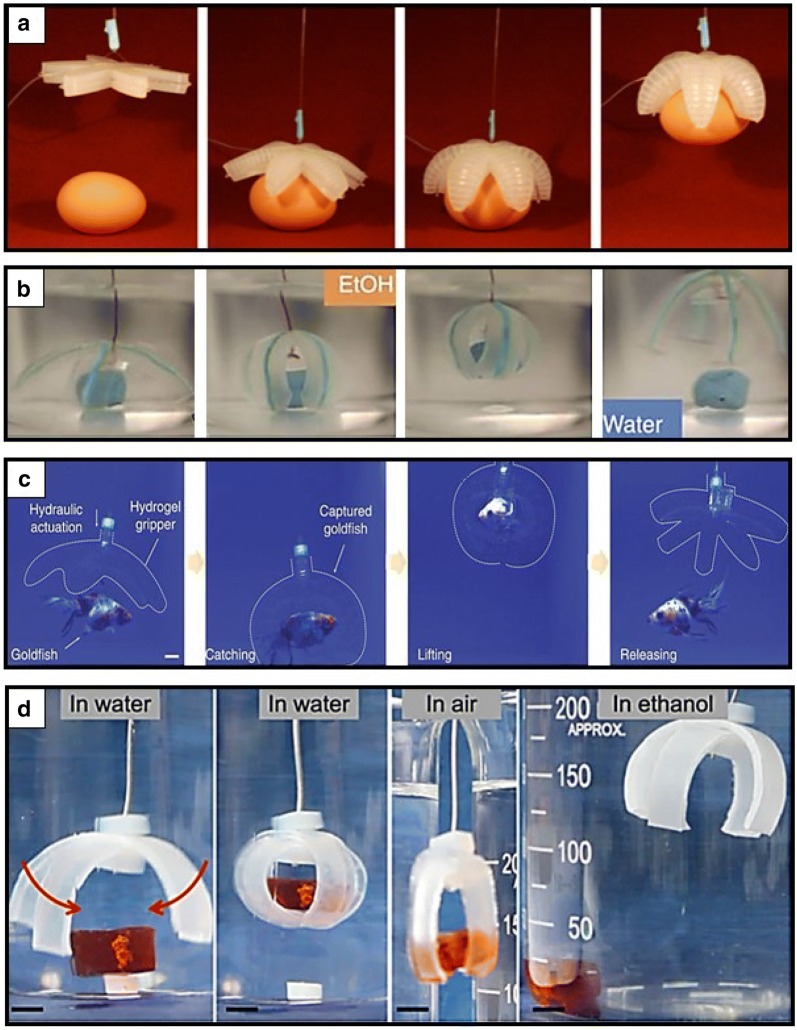
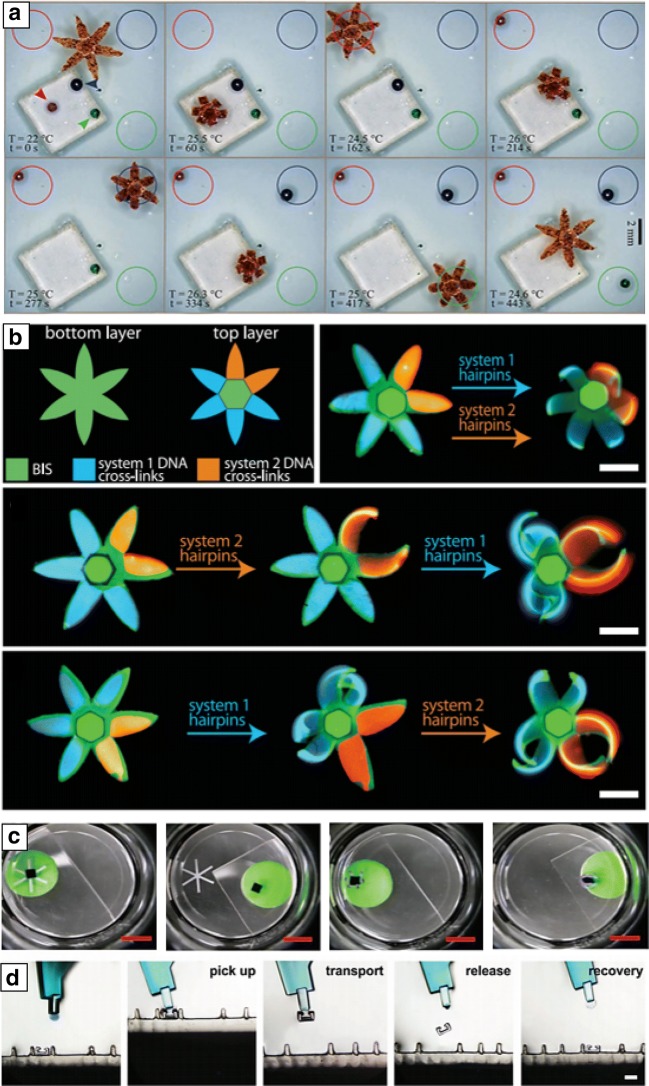
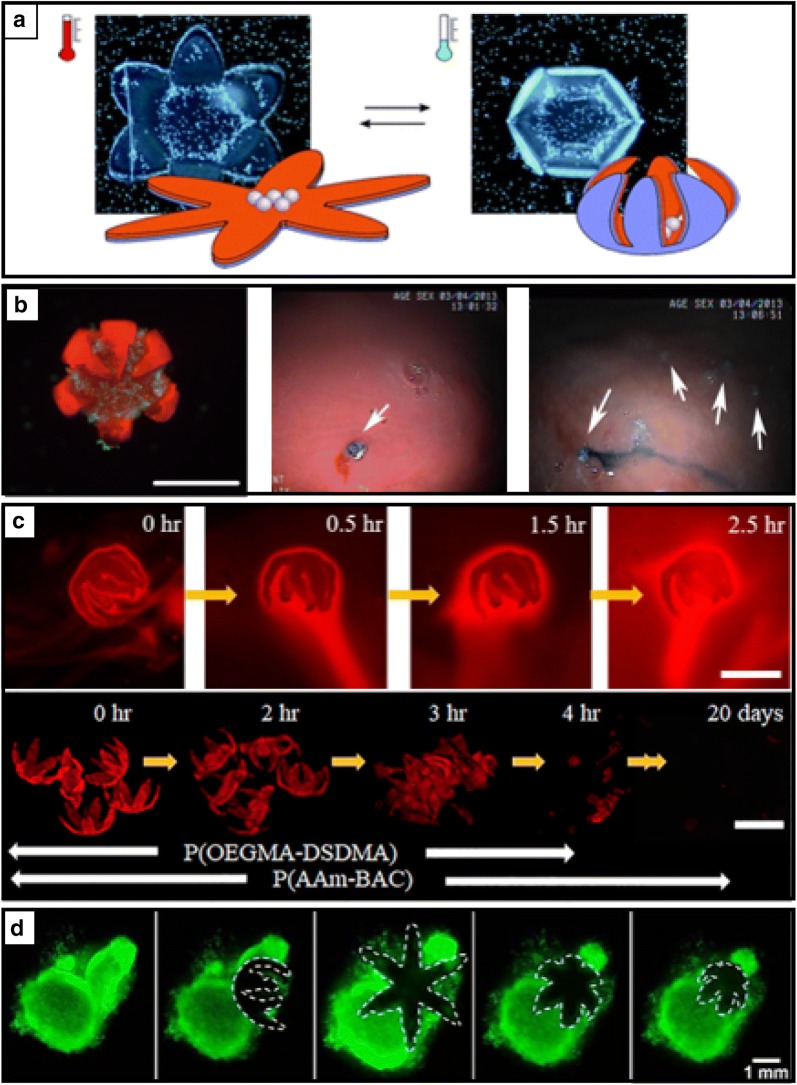
A variety of biomimetic stimuli-responsive soft grippers that can be utilized as intelligent actuators, sensors, or biomedical tools have been developed. This review covers stimuli-responsive materials, fabrication methods, and applications of soft grippers. This review specifically describes the current research progress in stimuli-responsive grippers composed of N-isopropylacrylamide hydrogel, thermal and light-responding liquid crystalline and/or pneumatic-driven shape-morphing elastomers. Furthermore, this article provides a brief overview of high-throughput assembly methods, such as photolithography and direct printing approaches, to create stimuli-responsive soft grippers. This review primarily focuses on stimuli-responsive soft gripping robots that can be utilized as tethered/untethered multiscale smart soft actuators, manipulators, or biomedical devices.
Keywords: Bio-MEMS; Intelligent systems; Self-folding; Soft actuators; Soft robots.
Conflict of interest statement
The author declares no competing interests.
Figures
References
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources