

Influence of Treadmill Speed and Perturbation Intensity on Selection of Balancing Strategies during Slow Walking Perturbed in the Frontal Plane
- PMID: 31281413
- PMCID: PMC6589317
- DOI: 10.1155/2019/1046459
Influence of Treadmill Speed and Perturbation Intensity on Selection of Balancing Strategies during Slow Walking Perturbed in the Frontal Plane
Abstract
Background: Common understanding is that adequate foot placement (stepping strategy) is crucial in maintaining stability during walking at normal speed. The aim of this study was to investigate strategies that humans use to cope with lateral perturbations during very slow walking.
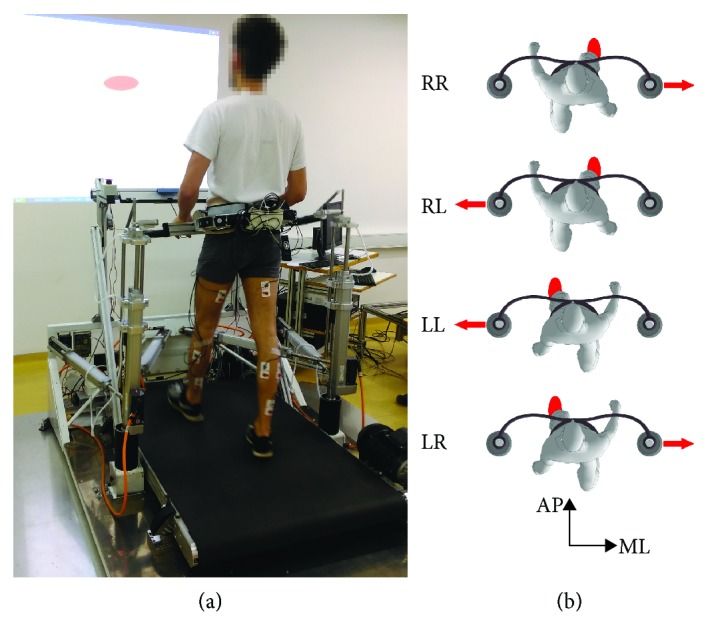
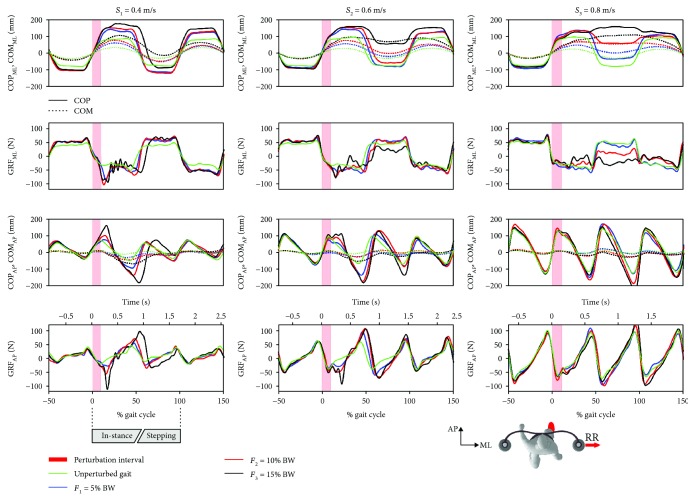
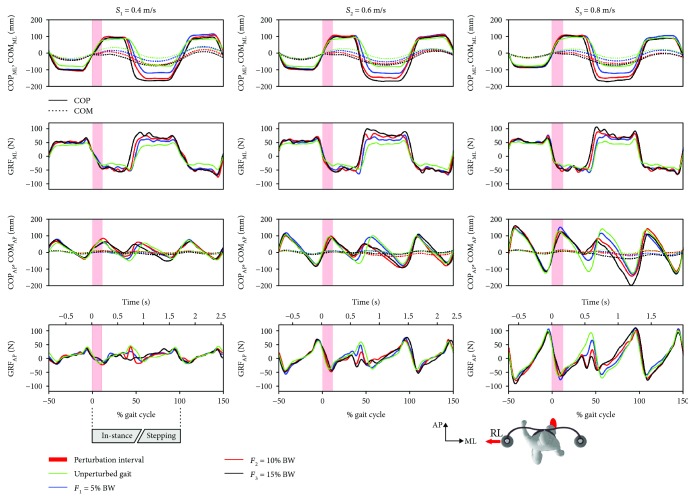
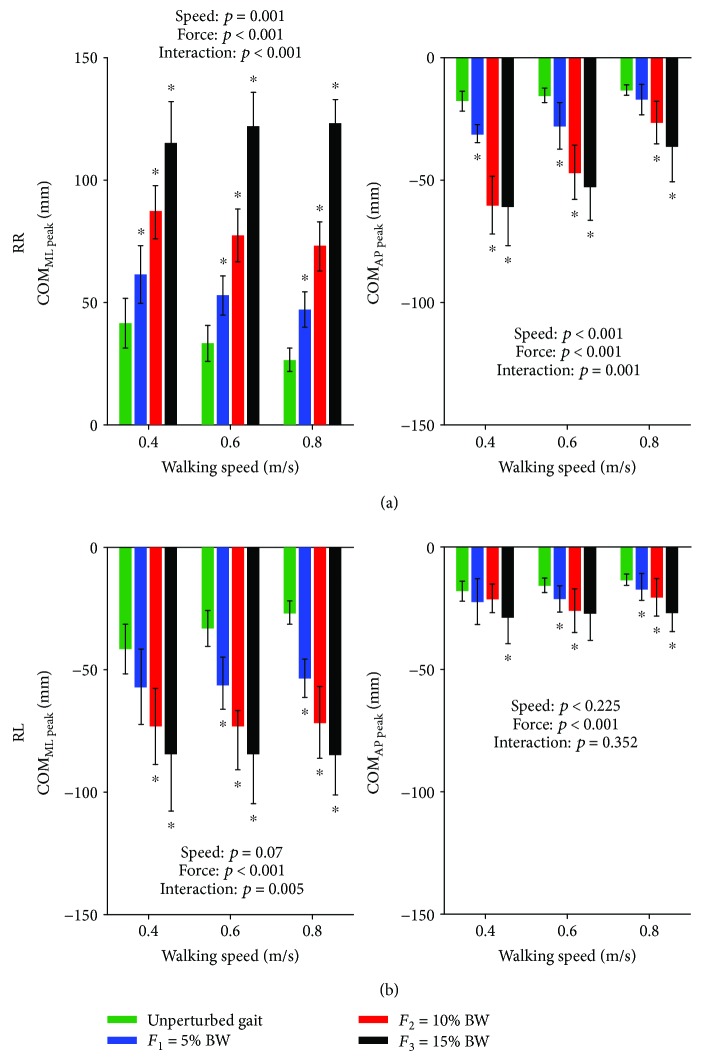
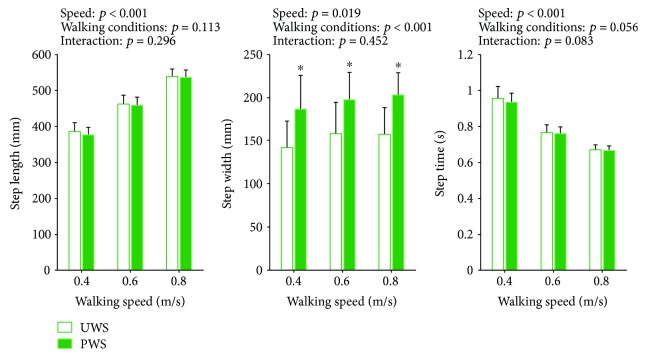
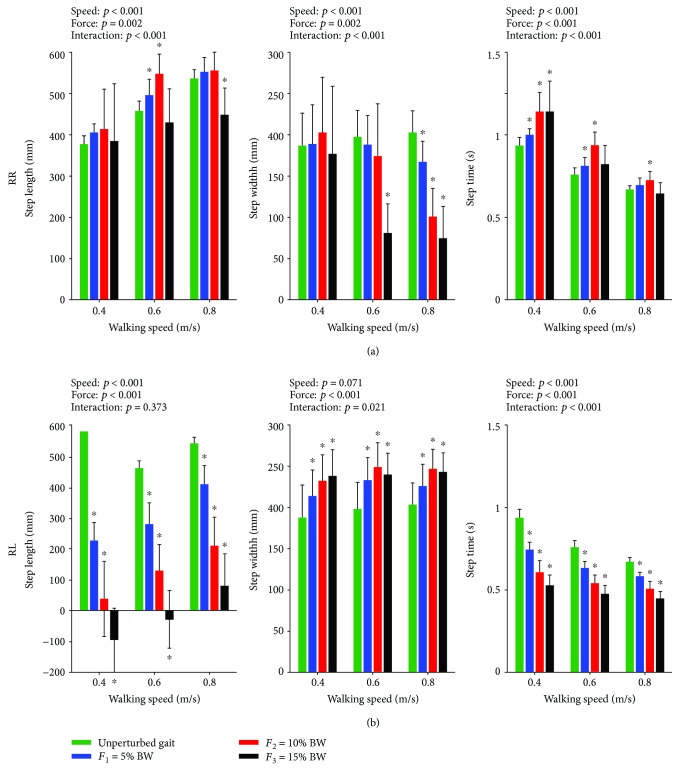
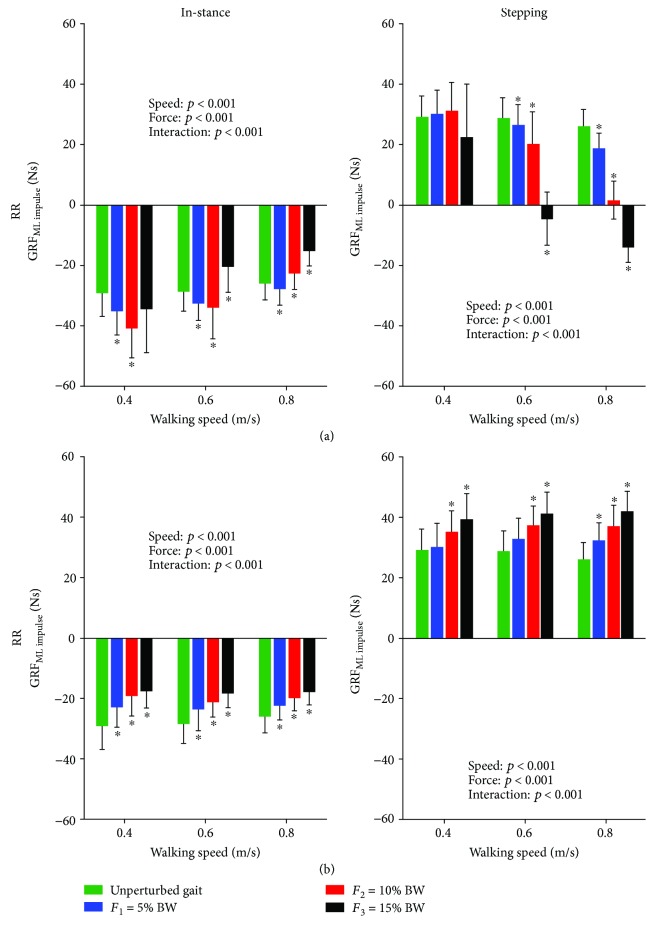
Methods: Ten healthy individuals underwent an experimental protocol whereby a set of perturbations directed inward (medially to a stance leg) and outward (laterally to a stance leg) of three intensities (F 1 = 5%, F 2 = 10%, and F 3 = 15% of body weight), applied at three instances of a stance phase, were delivered in random order to the pelvis using a balance assessment robot while walking on a treadmill at three walking speeds (S 1 = 0.4, S 2 = 0.6, and S 3 = 0.8 m/s). We analyzed the peak center of mass displacements; step length, step width, and step times; and the lateral component of ground reaction force for perturbations that were delivered at the beginning of the gait cycle.
Results: Responses after inward perturbations were similar at all tested speeds and consistently employed stepping strategy that was further facilitated by a shortened stance. Wider and shorter steps were applied with increased perturbation intensity. Responses following outward perturbations were more complex. At S 1, hip strategy (impulse-like increase of mediolateral ground reaction force) augmented with ankle strategy (mediolateral shift of the center of pressure) mainly contributed to responses already during the stance phase. The stance duration was significantly longer for all perturbation intensities. At S 2, the relative share of hip strategy was reduced while with increased perturbation intensity, stepping strategy was gradually added. The stance duration was significantly longer for F 1 and F 2. At S 3, stepping strategy was mainly used while the duration of stance was similar to the one in unperturbed walking. Responses following both inward and outward perturbations at all speeds were characterized by temporary slowing down movement in a sagittal plane that was more pronounced with increased perturbation intensity.
Conclusions: This study provides novel insights into balancing strategies used at slower walking speeds which may be more relevant to understand the challenges of gait stability following perturbations in the frontal plane in clinical populations.
Figures

References
LinkOut - more resources
Full Text Sources
