

Adjusting Assistance Commensurates with Patient Effort During Robot-Assisted Upper Limb Training for a Patient with Spasticity After Cervical Spinal Cord Injury: A Case Report
- PMID: 31344963
- PMCID: PMC6723405
- DOI: 10.3390/medicina55080404
Adjusting Assistance Commensurates with Patient Effort During Robot-Assisted Upper Limb Training for a Patient with Spasticity After Cervical Spinal Cord Injury: A Case Report
Abstract
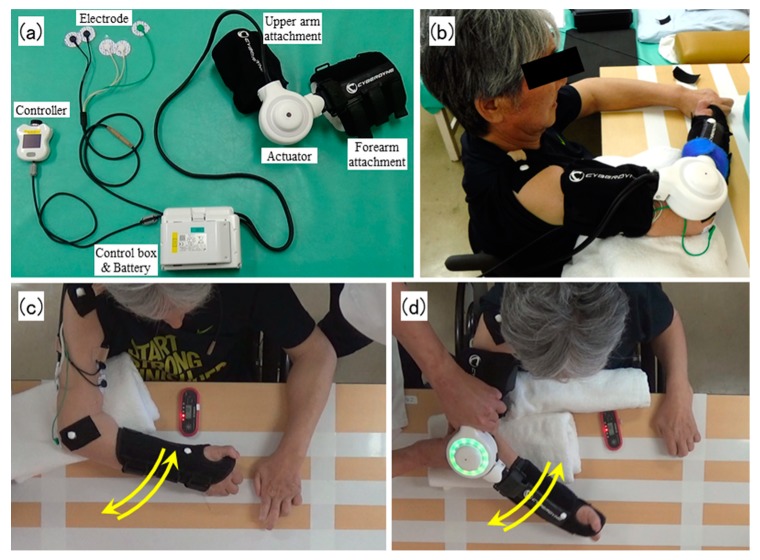
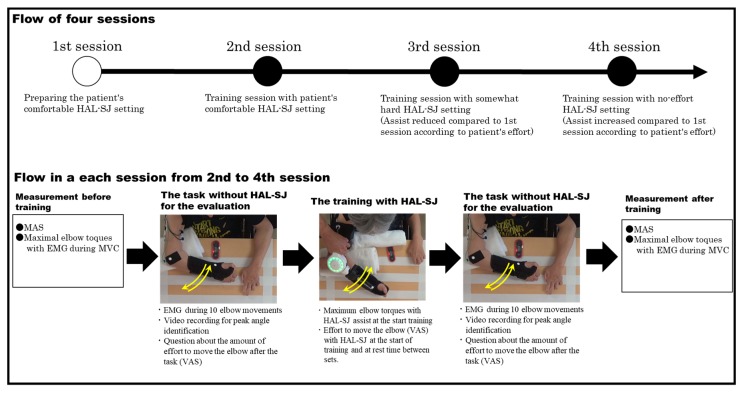
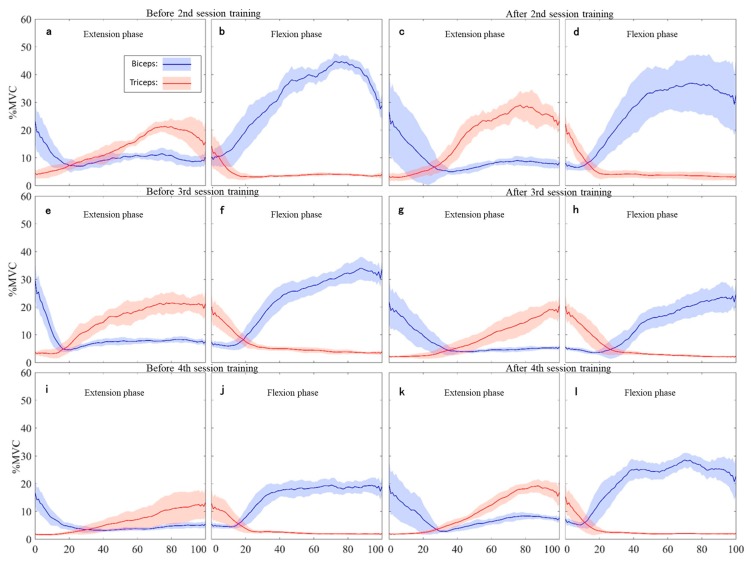
Limited evidence is available on optimal patient effort and degree of assistance to achieve preferable changes during robot-assisted training (RAT) for spinal cord injury (SCI) patients with spasticity. To investigate the relationship between patient effort and robotic assistance, we performed training using an electromyography-based robotic assistance device (HAL-SJ) in an SCI patient at multiple settings adjusted to patient effort. In this exploratory study, we report immediate change in muscle contraction patterns, patient effort, and spasticity in a 64-year-old man, diagnosed with cervical SCI and with American Spinal Injury Association Impairment Scale C level and C4 neurological level, who underwent RAT using HAL-SJ from post-injury day 403. Three patient effort conditions (comfortable, somewhat hard, and no-effort) by adjusting HAL-SJ's assists were set for each training session. Degree of effort during flexion and extension exercise was assessed by visual analog scale, muscle contraction pattern by electromyography, modified Ashworth scale, and maximum elbow extension and flexion torques, immediately before and after each training session, without HAL-SJ. The amount of effort during training with the HAL-SJ at each session was evaluated. The degree of effort during training can be set to three effort conditions as we intended by adjusting HAL-SJ. In sessions other than the no-effort setting, spasticity improved, and the level of effort was reduced immediately after training. Spasticity did not decrease in the training session using HAL-SJ with the no-effort setting, but co-contraction further increased during extension after training. Extension torque was unchanged in all sessions, and flexion torque decreased in all sessions. When performing upper-limb training with HAL-SJ in this SCI patient, the level of assistance with some effort may reduce spasticity and too strong assistance may increase co-contraction. Sometimes, a patient's effort may be seemingly unmeasurable; hence, the degree of patient effort should be further measured.
Keywords: effort; optimal assist; robot-assisted training; spasticity; spinal cord injury; upper limb.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Lee B.B., Cripps R.A., Fitzharris M., Wing P.C. The global map for traumatic spinal cord injury epidemiology: Update 2011, global incidence rate. [(accessed on 1 April 2019)];Spinal Cord. 2014 52:110–116. doi: 10.1038/sc.2012.158. Available online: https://www.ncbi.nlm.nih.gov/pubmed/23439068. - DOI - PubMed
-
- Katoh S., Enishi T., Sato N., Sairyo K. High incidence of acute traumatic spinal cord injury in a rural population in Japan in 2011 and 2012: An epidemiological study. [(accessed on 1 April 2019)];Spinal Cord. 2014 52:264–267. doi: 10.1038/sc.2014.13. Available online: https://www.nature.com/articles/sc201413.pdf. - DOI - PubMed
-
- National Spinal Cord Injury Statistical Center Spinal cord injury facts and figures at a glance. [(accessed on 1 April 2019)];J. Spinal Cord Med. 2012 35:197–198. Available online: https://www.ncbi.nlm.nih.gov/pubmed/22925743. - PMC - PubMed
-
- Dietz V., Sinkjaer T. Chapter 12–Spasticity. In: Verhaagen J., McDonald J.W., editors. Handbook of Clinical Neurology. Volume 109. Elsevier; Amsterdam, The Netherlands: 2012. pp. 197–211. - PubMed
-
- Mayo M., DeForest B.A., Castellanos M., Thomas C.K. Characterization of Involuntary contractions after spinal cord injury reveals associations between physiological and self-reported measures of spasticity. [(accessed on 1 April 2019)];Front. Integr. Neurosci. 2017 11:2. doi: 10.3389/fnint.2017.00002. Available online: https://www.ncbi.nlm.nih.gov/pubmed/28232792. - DOI - PMC - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
