

Fingerpad contact evolution under electrovibration
- PMID: 31362623
- PMCID: PMC6685024
- DOI: 10.1098/rsif.2019.0166
Fingerpad contact evolution under electrovibration
Abstract
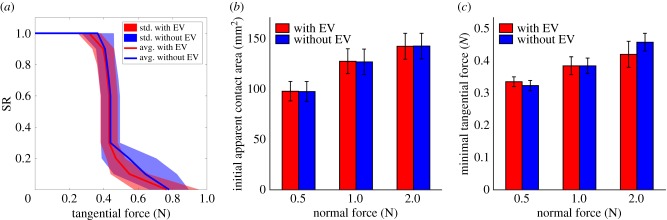
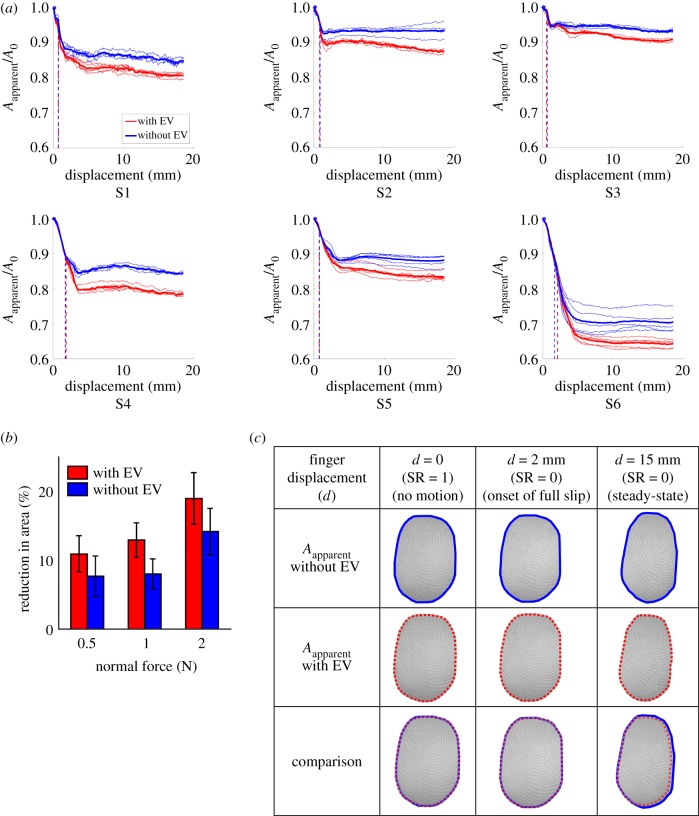
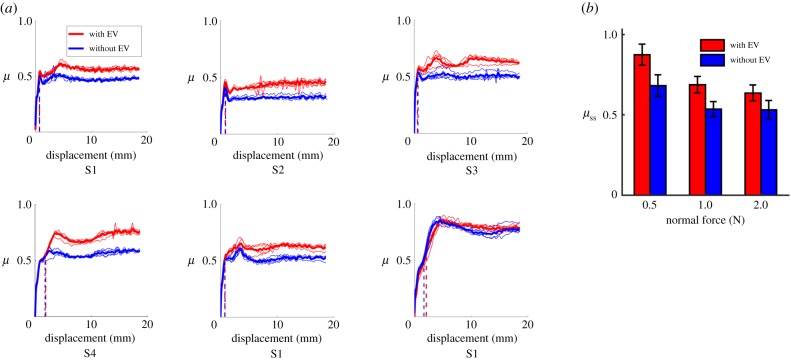
Displaying tactile feedback through a touchscreen via electrovibration has many potential applications in mobile devices, consumer electronics, home appliances and automotive industry though our knowledge and understanding of the underlying contact mechanics are very limited. An experimental study was conducted to investigate the contact evolution between the human finger and a touch screen under electrovibration using a robotic set-up and an imaging system. The results show that the effect of electrovibration is only present during full slip but not before slip. Hence, the coefficient of friction increases under electrovibration as expected during full slip, but the apparent contact area is significantly smaller during full slip when compared to that of no electrovibration condition. It is suggested that the main cause of the increase in friction during full slip is due to an increase in the real contact area and the reduction in apparent area is due to stiffening of the finger skin in the tangential direction.
Keywords: contact mechanics; electroadhesion; electrovibration; haptic perception; tactile feedback.
Conflict of interest statement
We declare we have no competing interests.
Figures
Similar articles
-
Finger motion and contact by a second finger influence the tactile perception of electrovibration.J R Soc Interface. 2021 Mar;18(176):20200783. doi: 10.1098/rsif.2020.0783. Epub 2021 Mar 31. J R Soc Interface. 2021. PMID: 33784888 Free PMC article.
-
Step-Change in Friction Under Electrovibration.IEEE Trans Haptics. 2020 Jan-Mar;13(1):137-143. doi: 10.1109/TOH.2020.2966992. Epub 2020 Jan 15. IEEE Trans Haptics. 2020. PMID: 31944995
-
Contact mechanics between the human finger and a touchscreen under electroadhesion.Proc Natl Acad Sci U S A. 2018 Dec 11;115(50):12668-12673. doi: 10.1073/pnas.1811750115. Epub 2018 Nov 27. Proc Natl Acad Sci U S A. 2018. PMID: 30482858 Free PMC article.
-
Finger pad friction and its role in grip and touch.J R Soc Interface. 2012 Dec 19;10(80):20120467. doi: 10.1098/rsif.2012.0467. Print 2013 Mar 6. J R Soc Interface. 2012. PMID: 23256185 Free PMC article. Review.
-
Minimal adhesion surface area in tangentially loaded digital contacts.J Biomech. 2011 Sep 2;44(13):2508-10. doi: 10.1016/j.jbiomech.2011.07.007. Epub 2011 Jul 19. J Biomech. 2011. PMID: 21774936 Review.
Cited by
-
Finger motion and contact by a second finger influence the tactile perception of electrovibration.J R Soc Interface. 2021 Mar;18(176):20200783. doi: 10.1098/rsif.2020.0783. Epub 2021 Mar 31. J R Soc Interface. 2021. PMID: 33784888 Free PMC article.
-
An innovative wearable device for sensing mechanoreceptor activation during touch.Sci Rep. 2025 Mar 22;15(1):9986. doi: 10.1038/s41598-025-92379-w. Sci Rep. 2025. PMID: 40121223 Free PMC article.
References
-
- Watanabe T, Fukui S. 1995. A method for controlling tactile sensation of surface roughness using ultrasonic vibration. In IEEE Int. Conf. Robotics and Automation, Nagoya, Japan, 21–27 May 1995 , pp. 1134–1139. (10.1109/ROBOT.1995.525433) - DOI
-
- Biet M, Giraud F, Lemaire-Semail B. 2008. Implementation of tactile feedback by modifying the perceived friction. Eur. Phys. J. Appl. Phys. 43, 123–136. (10.1051/epjap:2008093) - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
