

Variation in target volume and centroid position due to breath holding during four-dimensional computed tomography scanning: A phantom study
- PMID: 31385421
- PMCID: PMC6964747
- DOI: 10.1002/acm2.12692
Variation in target volume and centroid position due to breath holding during four-dimensional computed tomography scanning: A phantom study
Abstract
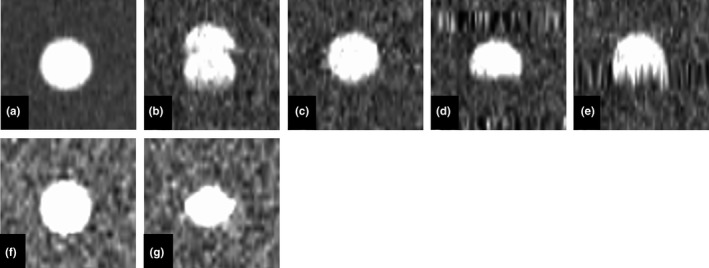
This study investigated the effects of respiratory motion, including unwanted breath holding, on the target volume and centroid position on four-dimensional computed tomography (4DCT) imaging. Cine 4DCT images were reconstructed based on a time-based sorting algorithm, and helical 4DCT images were reconstructed based on both the time-based sorting algorithm and an amplitude-based sorting algorithm. A spherical object 20 mm in diameter was moved according to several simulated respiratory motions, with a motion period of 4.0 s and maximum amplitude of 5 mm. The object was extracted automatically, and the target volume and centroid position in the craniocaudal direction were measured using a treatment planning system. When the respiratory motion included unwanted breath-holding times shorter than the breathing cycle, the root mean square errors (RSME) between the reference and imaged target volumes were 18.8%, 14.0%, and 5.5% in time-based images in cine mode, time-based images in helical mode, and amplitude-based images in helical mode, respectively. In helical mode, the RSME between the reference and imaged centroid position was reduced from 1.42 to 0.50 mm by changing the reconstruction method from time- to amplitude-based sorting. When the respiratory motion included unwanted breath-holding times equal to the breathing cycle, the RSME between the reference and imaged target volumes were 19.1%, 24.3%, and 15.6% in time-based images in cine mode, time-based images in helical mode, and amplitude-based images in helical mode, respectively. In helical mode, the RSME between the reference and imaged centroid position was reduced from 1.61 to 0.83 mm by changing the reconstruction method from time- to amplitude-based sorting. With respiratory motion including breath holding of shorter duration than the breathing cycle, the accuracies of the target volume and centroid position were improved by amplitude-based sorting, particularly in helical 4DCT.
Keywords: 4DCT; breath-holding time; scan mode; sorting algorithm.
© 2019 The Authors. Journal of Applied Clinical Medical Physics published by Wiley Periodicals, Inc. on behalf of American Association of Physicists in Medicine.
Conflict of interest statement
No conflict of interest.
Figures



References
-
- Korreman S, Presson G, Nygaard D, et al. Respiration‐correlated image guidance is the most important radiotherapy motion management strategy for most lung cancer patients. Int J Radiat Oncol Biol Phys. 2012;83:1338–1343. - PubMed
-
- Helou J, Karotki A, Milot L, et al. 4DCT simulation with synchronized contrast injection in liver SBRT patients. Technol Cancer Res Treatm. 2016;15:55–59. - PubMed
