

Appropriate Mother Wavelets for Continuous Gait Event Detection Based on Time-Frequency Analysis for Hemiplegic and Healthy Individuals
- PMID: 31398903
- PMCID: PMC6720436
- DOI: 10.3390/s19163462
Appropriate Mother Wavelets for Continuous Gait Event Detection Based on Time-Frequency Analysis for Hemiplegic and Healthy Individuals
Abstract
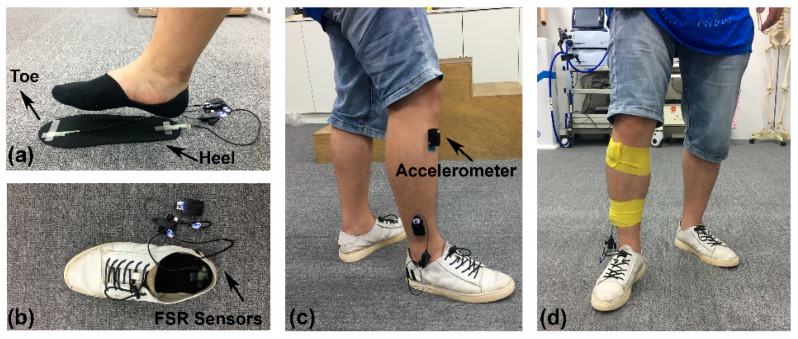
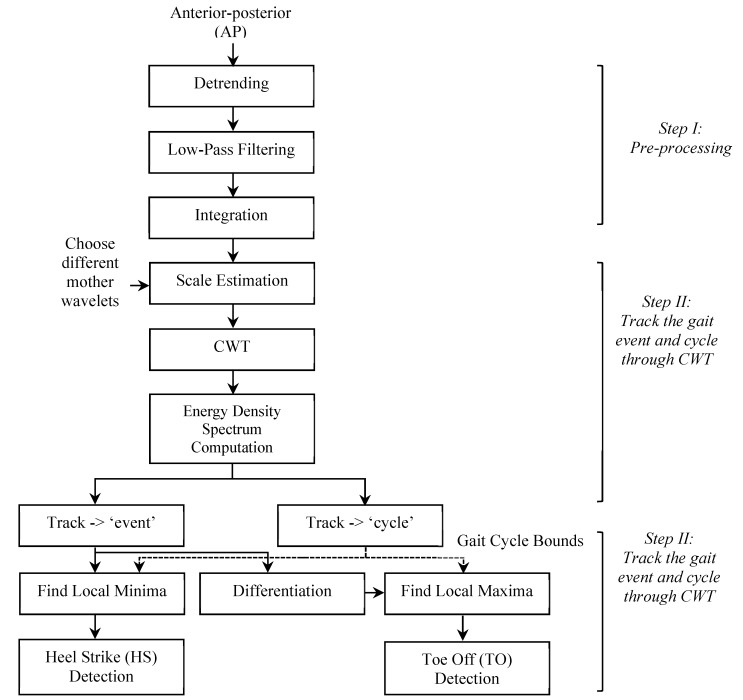
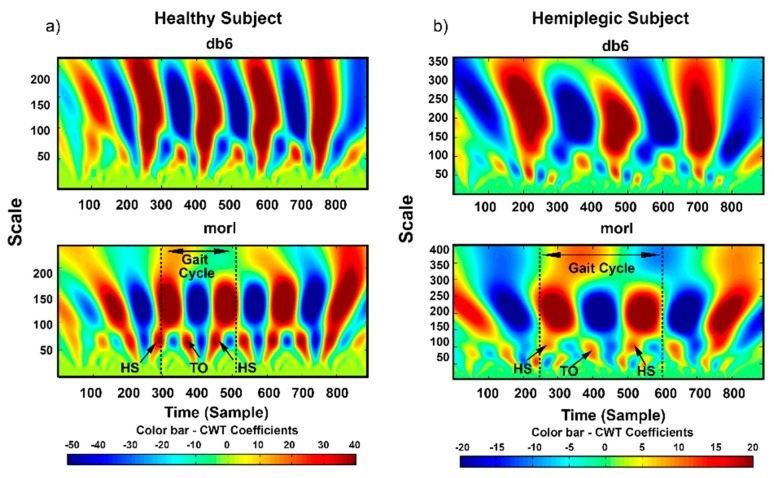
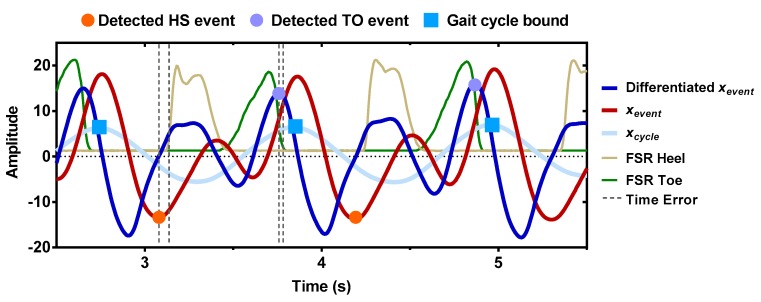
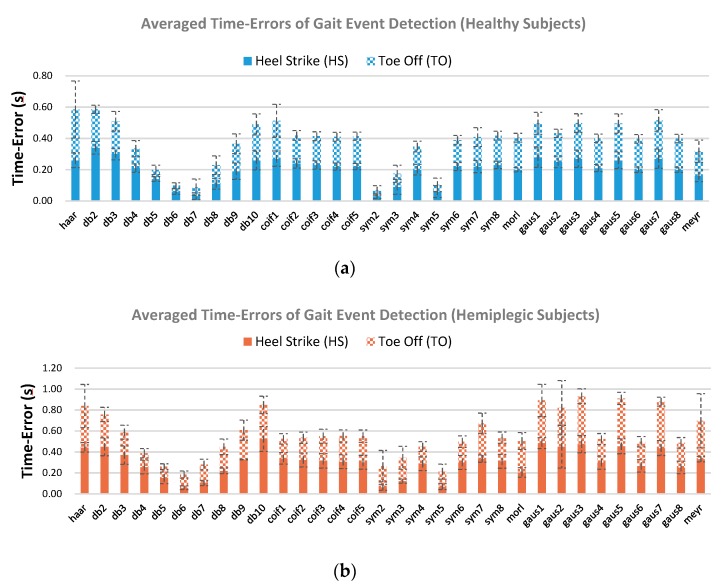
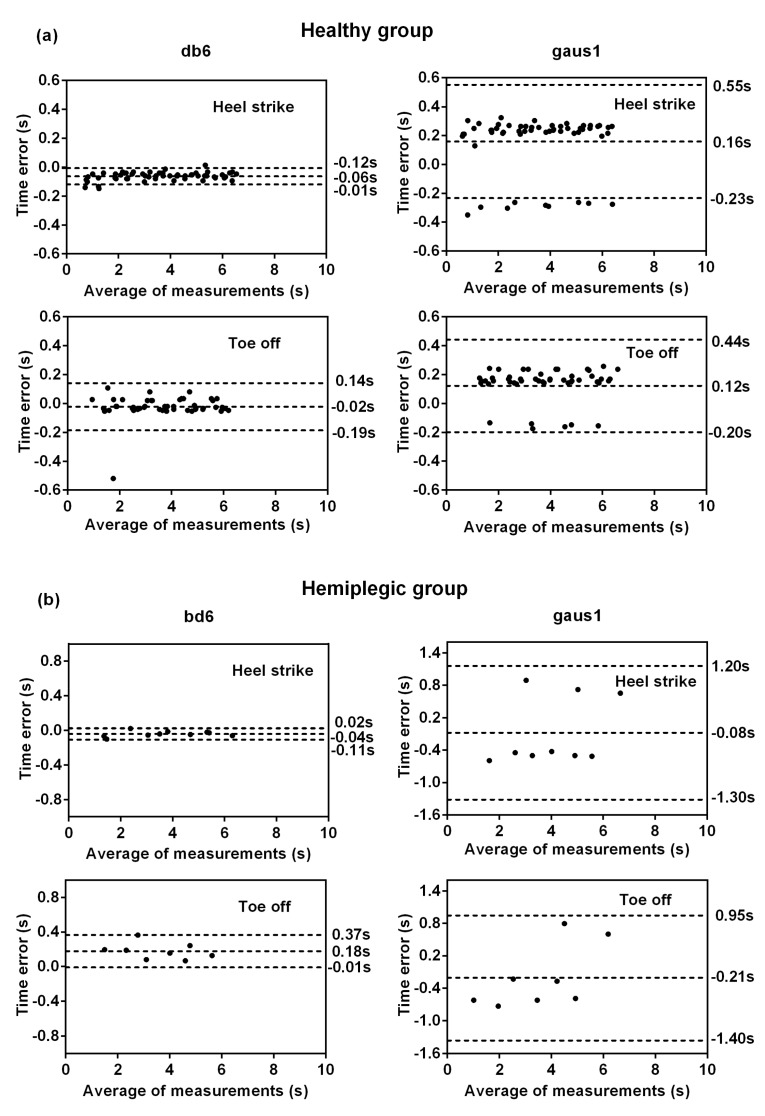
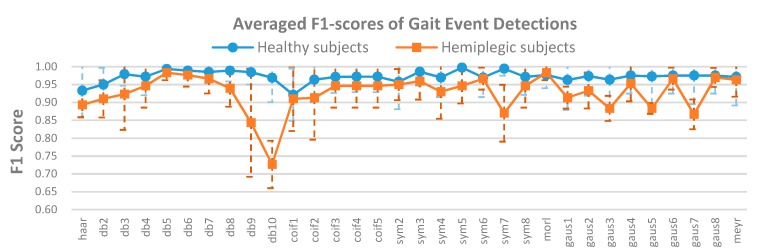
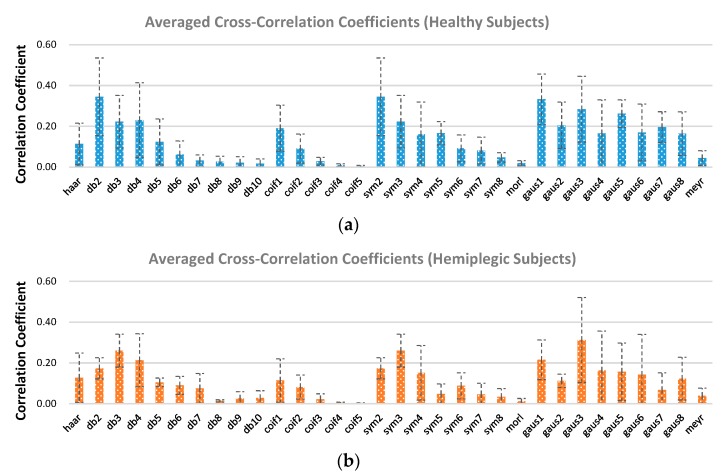
Gait event detection is a crucial step towards the effective assessment and rehabilitation of motor dysfunctions. Recently, the continuous wavelet transform (CWT) based methods have been increasingly proposed for gait event detection due to their robustness. However, few investigations on determining the appropriate mother wavelet with proper selection criteria have been performed, especially for hemiplegic patients. In this study, the performances of commonly used mother wavelets in detecting gait events were systematically investigated. The acceleration signals from the tibialis anterior muscle of both healthy and hemiplegic subjects were recorded during ground walking and the two core gait events of heel strike (HS) and toe off (TO) were detected from the signal recordings by a CWT algorithm with different mother wavelets. Our results showed that the overall performance of the CWT algorithm in detecting the two gait events was significantly different when using various mother wavelets. By using different wavelet selection criteria, we also found that the accuracy criteria based on time-error minimization and F1-score maximization could provide the appropriate mother wavelet for gait event detection. The findings from this study will provide an insight on the selection of an appropriate mother wavelet for gait event detection and facilitate the development of adequate rehabilitation aids.
Keywords: acceleration signal; appropriate mother wavelet; gait event detection; hemiplegic gait; wavelet-selection criteria.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
Similar articles
-
Towards Real-Time Detection of Gait Events on Different Terrains Using Time-Frequency Analysis and Peak Heuristics Algorithm.Sensors (Basel). 2016 Oct 1;16(10):1634. doi: 10.3390/s16101634. Sensors (Basel). 2016. PMID: 27706086 Free PMC article.
-
Verification of accuracy and validity of gait phase detection system using motion sensors for applying walking assistive FES.Comput Methods Biomech Biomed Engin. 2012;15(11):1129-35. doi: 10.1080/10255842.2011.575376. Epub 2011 May 23. Comput Methods Biomech Biomed Engin. 2012. PMID: 21607889
-
Cross-step detection using center-of-pressure based algorithm for real-time applications.J Neuroeng Rehabil. 2024 Sep 16;21(1):161. doi: 10.1186/s12984-024-01460-4. J Neuroeng Rehabil. 2024. PMID: 39285381 Free PMC article.
-
Unsupervised segmentation of heel-strike IMU data using rapid cluster estimation of wavelet features.Annu Int Conf IEEE Eng Med Biol Soc. 2013;2013:953-6. doi: 10.1109/EMBC.2013.6609660. Annu Int Conf IEEE Eng Med Biol Soc. 2013. PMID: 24109847
-
Analysis of the performance of 17 algorithms from a systematic review: Influence of sensor position, analysed variable and computational approach in gait timing estimation from IMU measurements.Gait Posture. 2018 Oct;66:76-82. doi: 10.1016/j.gaitpost.2018.08.025. Epub 2018 Aug 23. Gait Posture. 2018. PMID: 30170137
Cited by
-
A Determination Method for Gait Event Based on Acceleration Sensors.Sensors (Basel). 2019 Dec 12;19(24):5499. doi: 10.3390/s19245499. Sensors (Basel). 2019. PMID: 31842502 Free PMC article.
-
Automatic gait events detection with inertial measurement units: healthy subjects and moderate to severe impaired patients.J Neuroeng Rehabil. 2024 Jun 18;21(1):104. doi: 10.1186/s12984-024-01405-x. J Neuroeng Rehabil. 2024. PMID: 38890696 Free PMC article.
-
Personalised Gait Recognition for People with Neurological Conditions.Sensors (Basel). 2022 May 24;22(11):3980. doi: 10.3390/s22113980. Sensors (Basel). 2022. PMID: 35684600 Free PMC article.
-
A Review of Gait Phase Detection Algorithms for Lower Limb Prostheses.Sensors (Basel). 2020 Jul 17;20(14):3972. doi: 10.3390/s20143972. Sensors (Basel). 2020. PMID: 32708924 Free PMC article. Review.
-
A Deep Learning Approach for Gait Event Detection from a Single Shank-Worn IMU: Validation in Healthy and Neurological Cohorts.Sensors (Basel). 2022 May 19;22(10):3859. doi: 10.3390/s22103859. Sensors (Basel). 2022. PMID: 35632266 Free PMC article.
References
-
- Cui C., Bian G.B., Hou Z.G., Zhao J., Su G., Zhou H., Peng L., Wang W. Simultaneous Recognition and Assessment of Post-Stroke Hemiparetic Gait by Fusing Kinematic, Kinetic, and Electrophysiological Data. IEEE Trans. Neural Syst. Rehabil. Eng. 2018;24:856–864. doi: 10.1109/TNSRE.2018.2811415. - DOI - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
