

Search Strategies in the Perceptual-Motor Workspace and the Acquisition of Coordination, Control, and Skill
- PMID: 31474912
- PMCID: PMC6702327
- DOI: 10.3389/fpsyg.2019.01874
Search Strategies in the Perceptual-Motor Workspace and the Acquisition of Coordination, Control, and Skill
Abstract
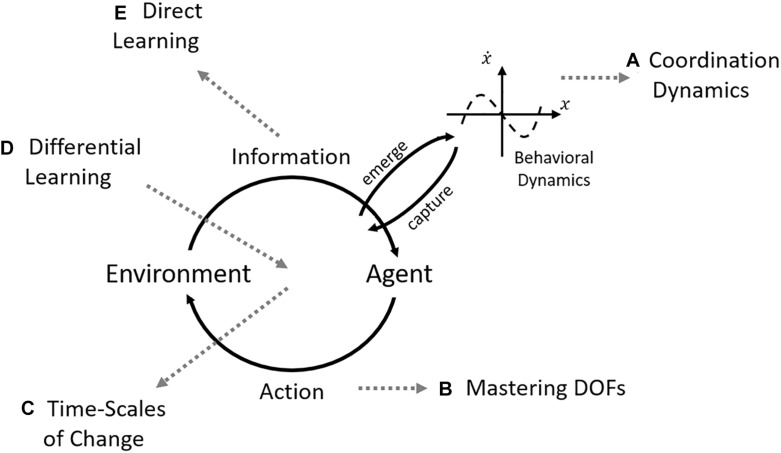
In this paper we re-visit and elaborate-on the theoretical framework of learning as searching within the perceptual-motor workspace for a solution to the task. The central focus is the nature of search strategies to locate and create stable equilibrium regions in the perceptual-motor workspace and how these strategies relate to the emergent movement forms in the acquisition of coordination, control, and skill. In the ecological theory of perception and action, the enhanced stability of performance occurs through the attunement of the perceptual systems to the task dynamics together with modifications of action as task and intrinsic dynamics cooperate and/or compete. Thus, through practice in this search process, individuals adapt to the pick-up of task relevant perceptual variables and change their movement form according to the stability of the performed action and its outcome in relation to the task demands. Contemporary experimental findings have revealed features of the search process given the interaction of individual intrinsic dynamics in the context of task requirements and principles that drive the change - e.g., exploitation of more tolerant task-space solutions and emergence of compensatory mechanisms. Finally, we outline how the search strategy framework relates to traditional learning-related phenomena: including the dynamical pathways of learning, learning curves, factors of learning, individuality, motor development, and sport and rehabilitation interventions.
Keywords: coordinative structures; dynamical systems; ecological psychology; exploration; individual-differences; intrinsic dynamics; motor learning.
Figures
References
-
- Abraham R. H., Shaw C. D. (1992). Dynamics: The Geometry of Behavior. Redwood, CA: Addison-Wesley.
-
- Adams J. A. (1987). Historical review and appraisal of research on the learning, retention, and transfer of human motor skills. Psychol. Bull. 101 41–74. 10.1037/0033-2909.101.1.41 - DOI
LinkOut - more resources
Full Text Sources